

Omnidirectional Manipulation of Microparticles on a Platform Subjected to Circular Motion Applying Dynamic Dry Friction Control
- PMID: 35630178
- PMCID: PMC9146381
- DOI: 10.3390/mi13050711
Omnidirectional Manipulation of Microparticles on a Platform Subjected to Circular Motion Applying Dynamic Dry Friction Control
Abstract
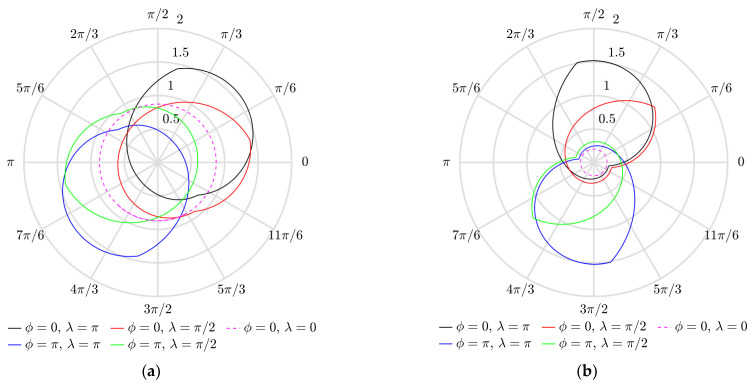
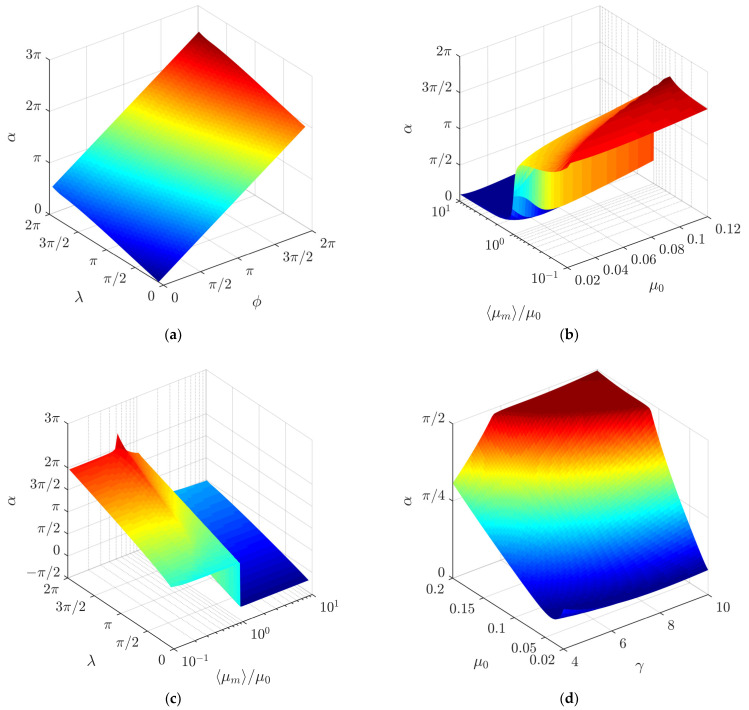
Currently used planar manipulation methods that utilize oscillating surfaces are usually based on asymmetries of time, kinematic, wave, or power types. This paper proposes a method for omnidirectional manipulation of microparticles on a platform subjected to circular motion, where the motion of the particle is achieved and controlled through the asymmetry created by dynamic friction control. The range of angles at which microparticles can be directed, and the average velocity were considered figures of merit. To determine the intrinsic parameters of the system that define the direction and velocity of the particles, a nondimensional mathematical model of the proposed method was developed, and modeling of the manipulation process was carried out. The modeling has shown that it is possible to direct the particle omnidirectionally at any angle over the full 2π range by changing the phase shift between the function governing the circular motion and the dry friction control function. The shape of the trajectory and the average velocity of the particle depend mainly on the width of the dry friction control function. An experimental investigation of omnidirectional manipulation was carried out by implementing the method of dynamic dry friction control. The experiments verified that the asymmetry created by dynamic dry friction control is technically feasible and can be applied for the omnidirectional manipulation of microparticles. The experimental results were consistent with the modeling results and qualitatively confirmed the influence of the control parameters on the motion characteristics predicted by the modeling. The study enriches the classical theories of particle motion on oscillating rigid plates, and it is relevant for the industries that implement various tasks related to assembling, handling, feeding, transporting, or manipulating microparticles.
Keywords: control; dry friction; micromanipulation; microparticles; motion control; oscillating platform; vibrations.
Conflict of interest statement
The authors declare no conflict of interest.
Figures













References
-
- Warnat S., King H., Wasay A., Sameoto D., Hubbard T. Direct integration of MEMS, dielectric pumping and cell manipulation with reversibly bonded gecko adhesive microfluidics. J. Micromech. Microeng. 2016;26:097001. doi: 10.1088/0960-1317/26/9/097001. - DOI
-
- Wu Z., Xu Q. Survey on recent designs of compliant micro-/nano-positioning stages. Actuators. 2018;7:5. doi: 10.3390/act7010005. - DOI
-
- Wang G., Ding Y., Long H., Guan Y., Lu X., Wang Y., Yang L. Simulation of Optical Nano-Manipulation with Metallic Single and Dual Probe Irradiated by Polarized Near-Field Laser. Appl. Sci. 2022;12:815. doi: 10.3390/app12020815. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
