

All-printed soft human-machine interface for robotic physicochemical sensing
- PMID: 35648844
- PMCID: PMC9302713
- DOI: 10.1126/scirobotics.abn0495
All-printed soft human-machine interface for robotic physicochemical sensing
Abstract
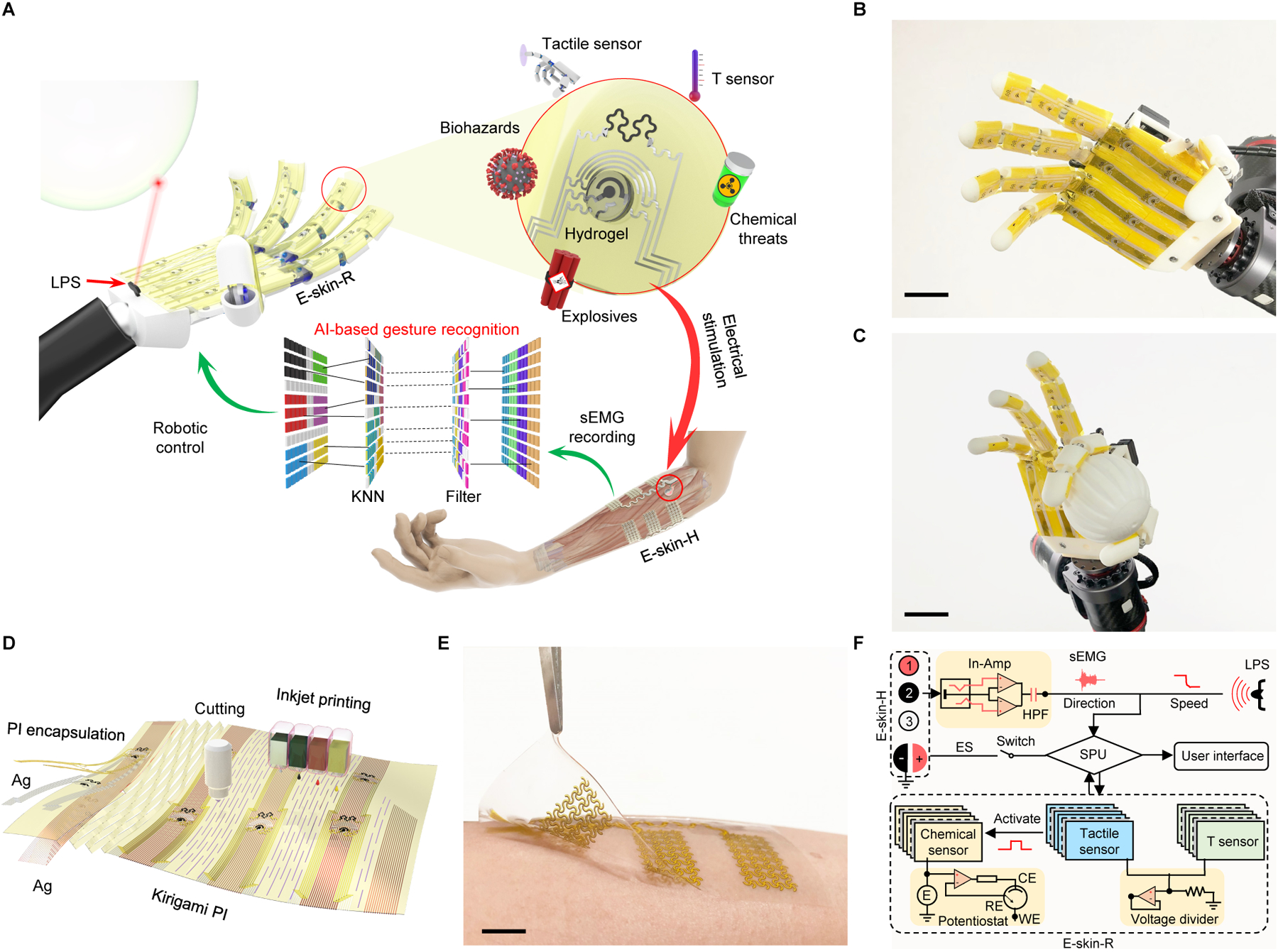
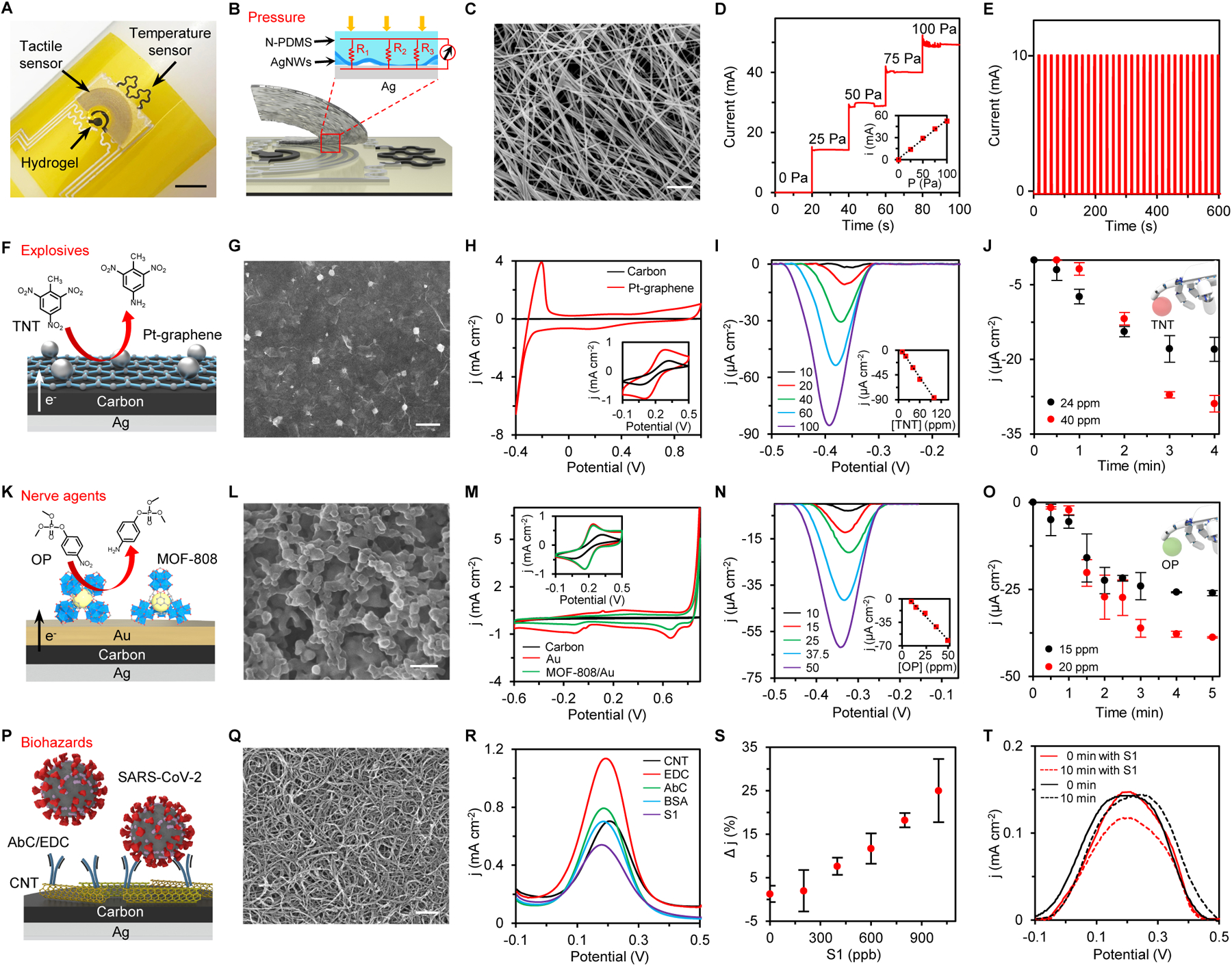
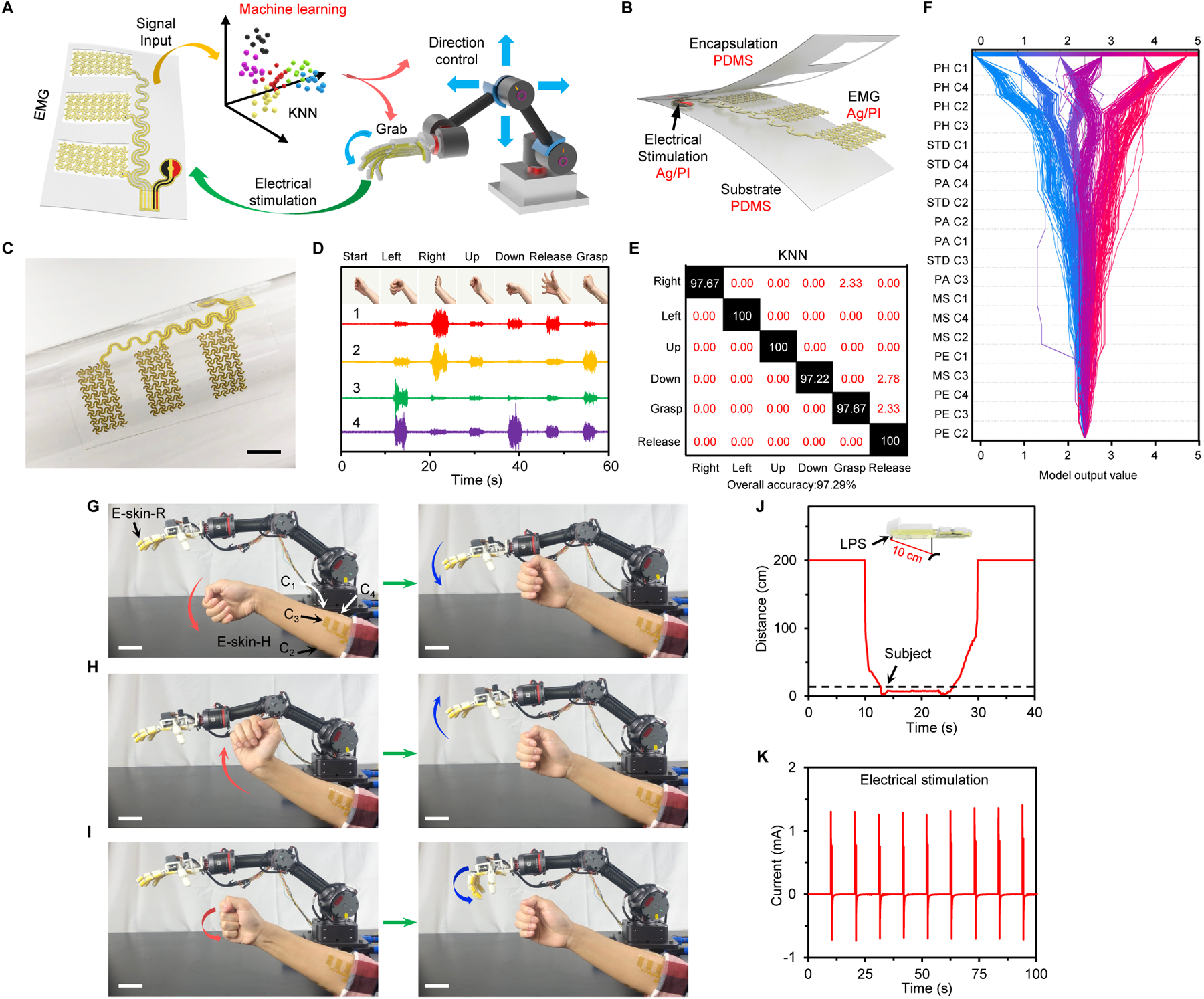
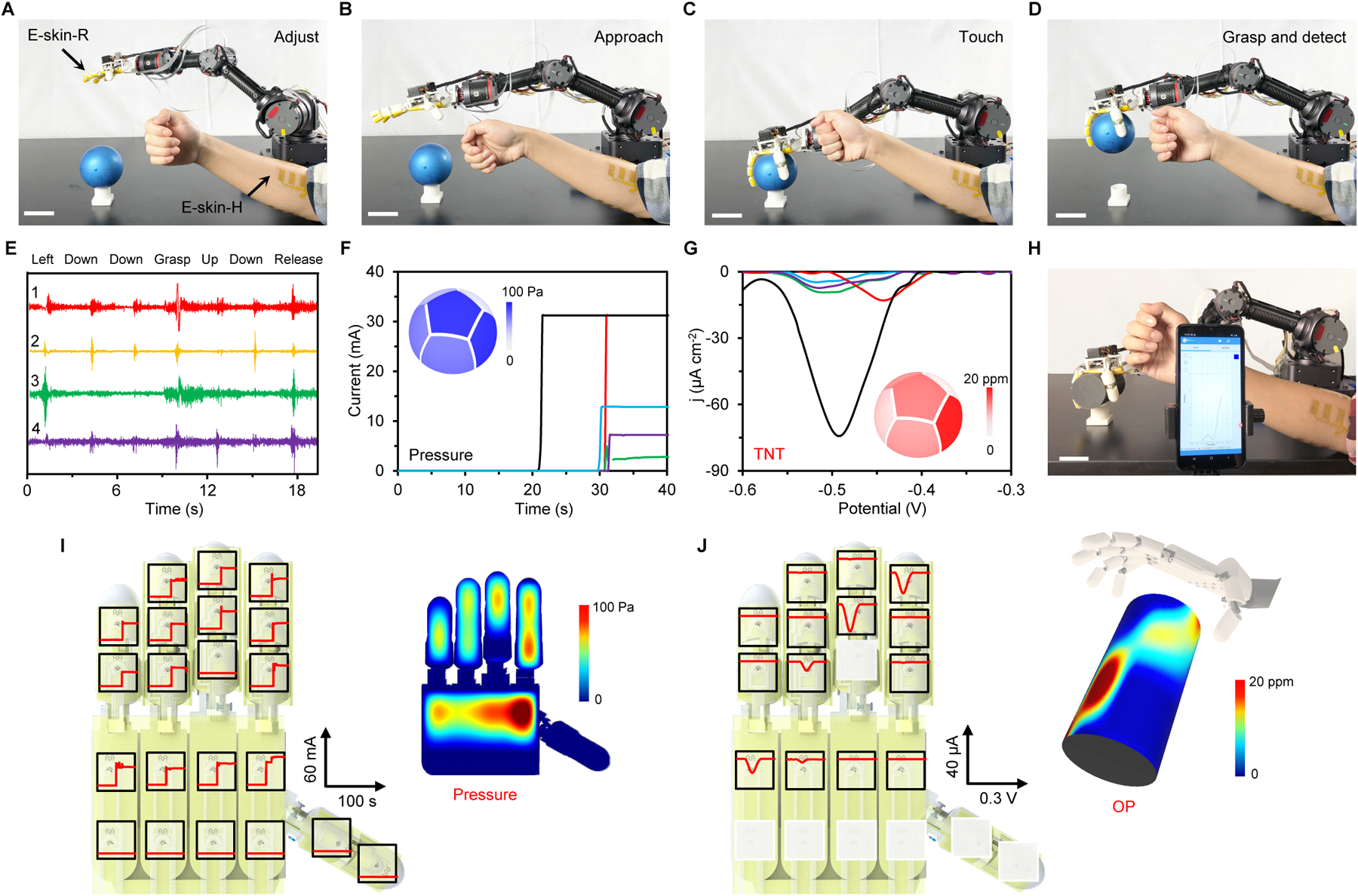
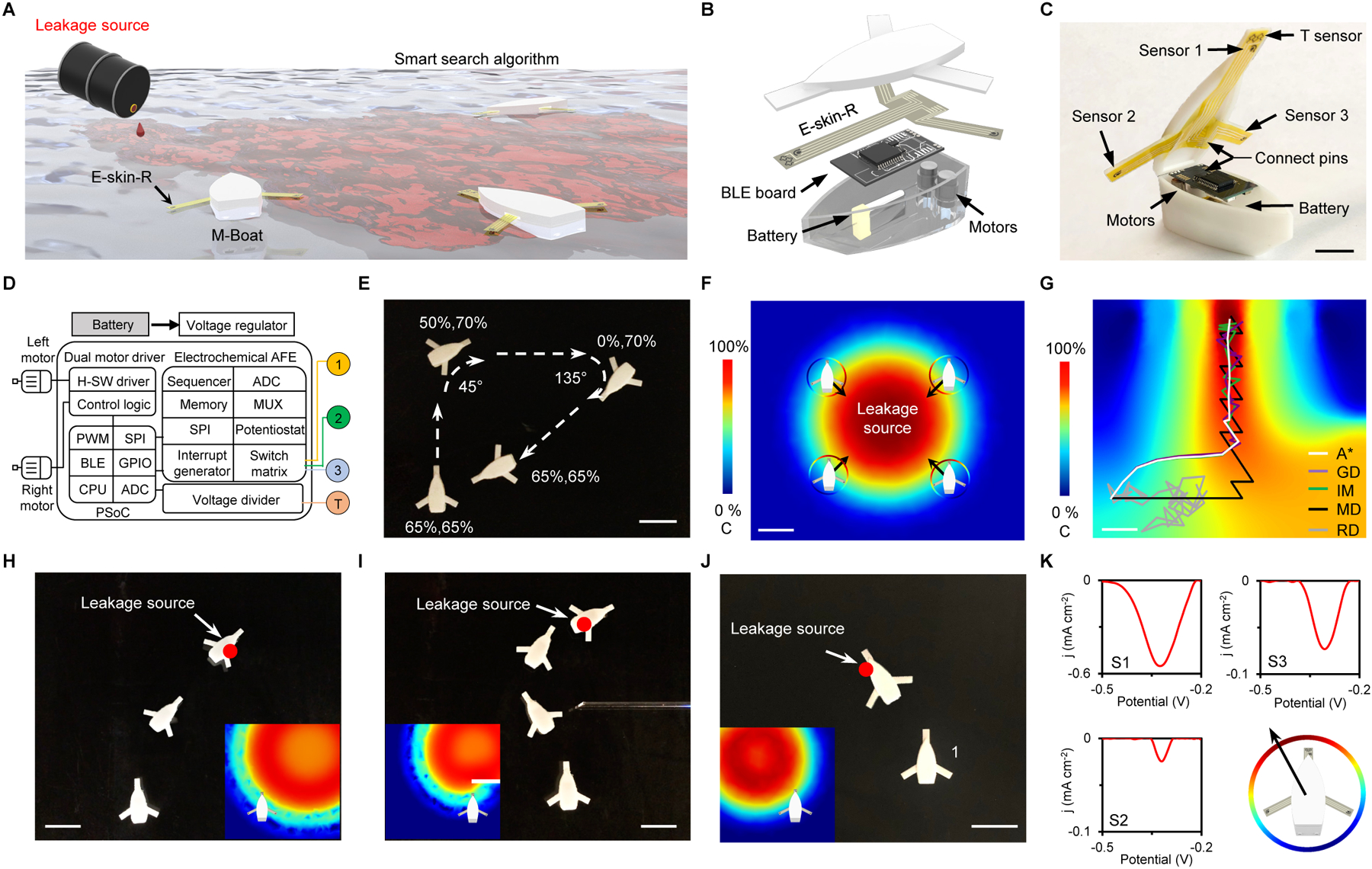
Ultrasensitive multimodal physicochemical sensing for autonomous robotic decision-making has numerous applications in agriculture, security, environmental protection, and public health. Previously reported robotic sensing technologies have primarily focused on monitoring physical parameters such as pressure and temperature. Integrating chemical sensors for autonomous dry-phase analyte detection on a robotic platform is rather extremely challenging and substantially underdeveloped. Here, we introduce an artificial intelligence-powered multimodal robotic sensing system (M-Bot) with an all-printed mass-producible soft electronic skin-based human-machine interface. A scalable inkjet printing technology with custom-developed nanomaterial inks was used to manufacture flexible physicochemical sensor arrays for electrophysiology recording, tactile perception, and robotic sensing of a wide range of hazardous materials including nitroaromatic explosives, pesticides, nerve agents, and infectious pathogens such as SARS-CoV-2. The M-Bot decodes the surface electromyography signals collected from the human body through machine learning algorithms for remote robotic control and can perform in situ threat compound detection in extreme or contaminated environments with user-interactive tactile and threat alarm feedback. The printed electronic skin-based robotic sensing technology can be further generalized and applied to other remote sensing platforms. Such diversity was validated on an intelligent multimodal robotic boat platform that can efficiently track the source of trace amounts of hazardous compounds through autonomous and intelligent decision-making algorithms. This fully printed human-machine interactive multimodal sensing technology could play a crucial role in designing future intelligent robotic systems and can be easily reconfigured toward numerous practical wearable and robotic applications.
Conflict of interest statement
Figures
References
-
- Yang G-Z, Bellingham J, Dupont PE, Fischer P, Floridi L, Full R, Jacobstein N, Kumar V, McNutt M, Merrifield R, Nelson BJ, Scassellati B, Taddeo M, Taylor R, Veloso M, Wang ZL, Wood R, The grand challenges of Science Robotics. Sci. Robot 3, eaar7650 (2018). - PubMed
-
- Sundaram S, Kellnhofer P, Li Y, Zhu J-Y, Torralba A, Matusik W, Learning the signatures of the human grasp using a scalable tactile glove. Nature 569, 698–702 (2019). - PubMed
-
- Cianchetti M, Laschi C, Menciassi A, Dario P, Biomedical applications of soft robotics. Nat. Rev. Mater 3, 143–153 (2018).
-
- Chortos A, Liu J, Bao Z, Pursuing prosthetic electronic skin. Nat. Mater 15, 937–950 (2016). - PubMed
-
- Boutry CM, Negre M, Jorda M, Vardoulis O, Chortos A, Khatib O, Bao Z, A hierarchically patterned, bioinspired e-skin able to detect the direction of applied pressure for robotics. Sci. Robot 3, eaau6914 (2018). - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
Miscellaneous
