

The control and training of single motor units in isometric tasks are constrained by a common input signal
- PMID: 35670561
- PMCID: PMC9208758
- DOI: 10.7554/eLife.72871
The control and training of single motor units in isometric tasks are constrained by a common input signal
Abstract
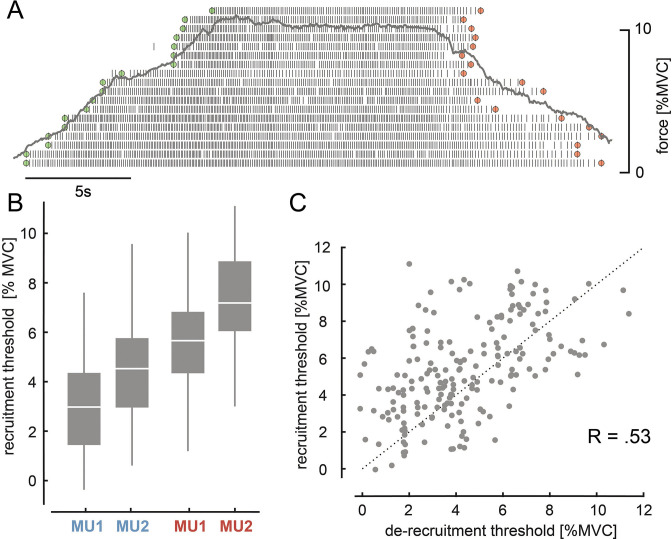
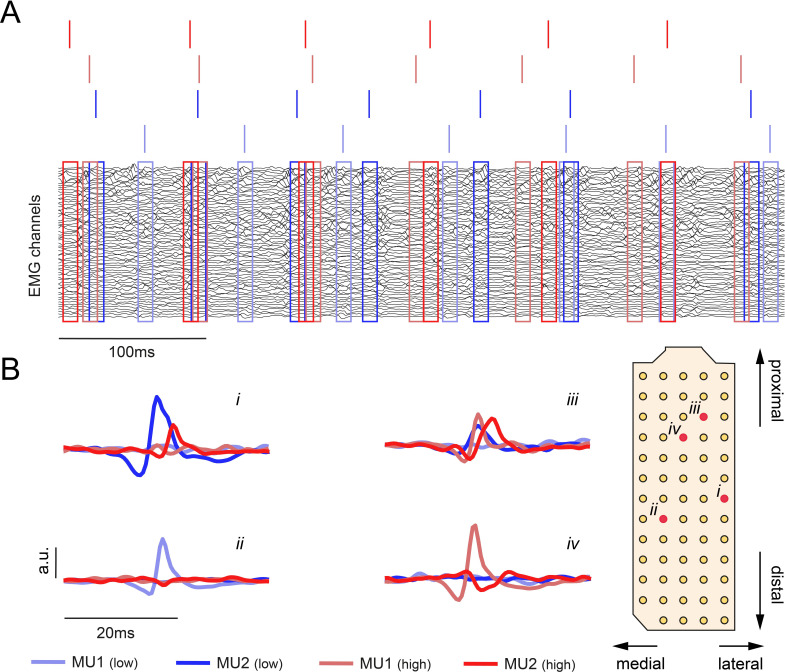
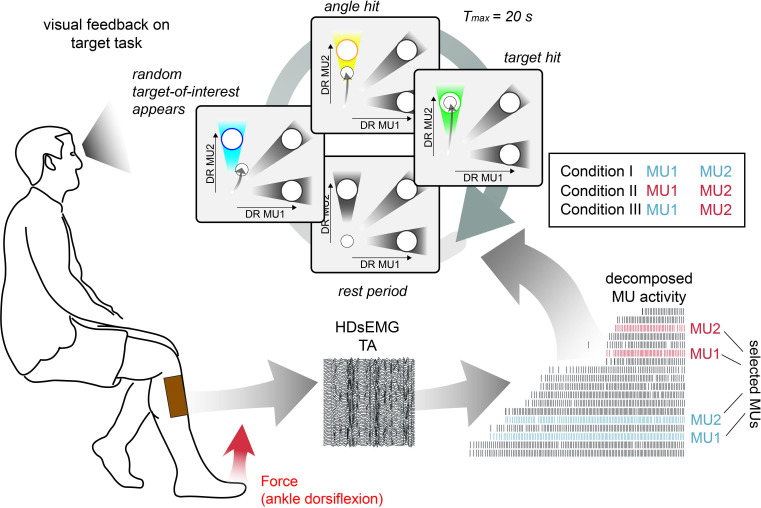
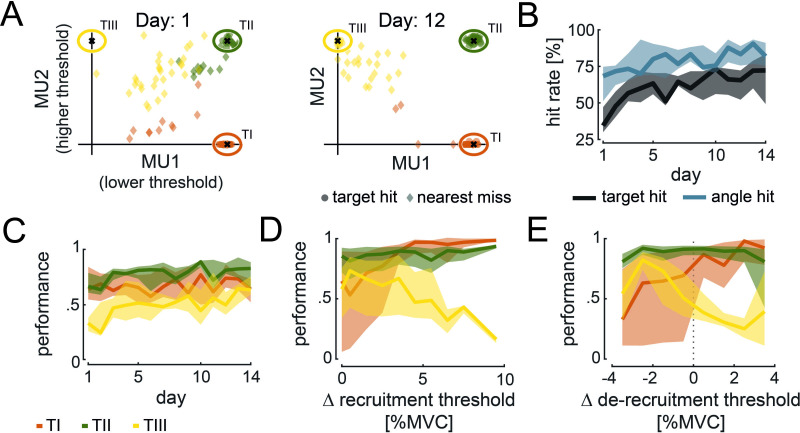
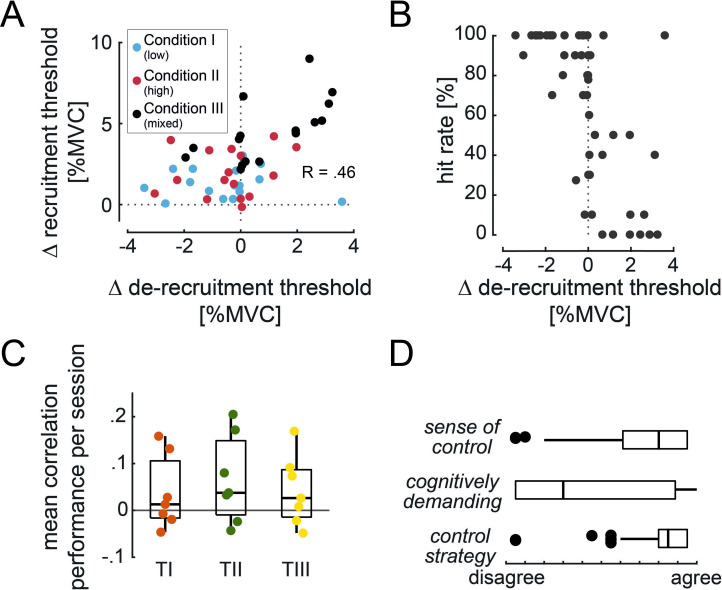
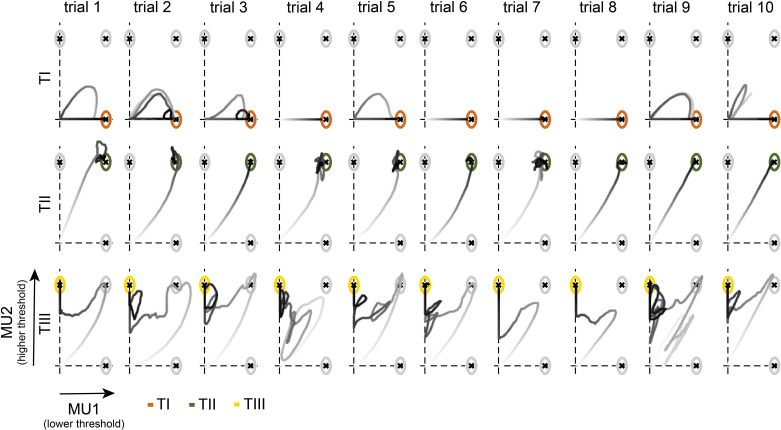
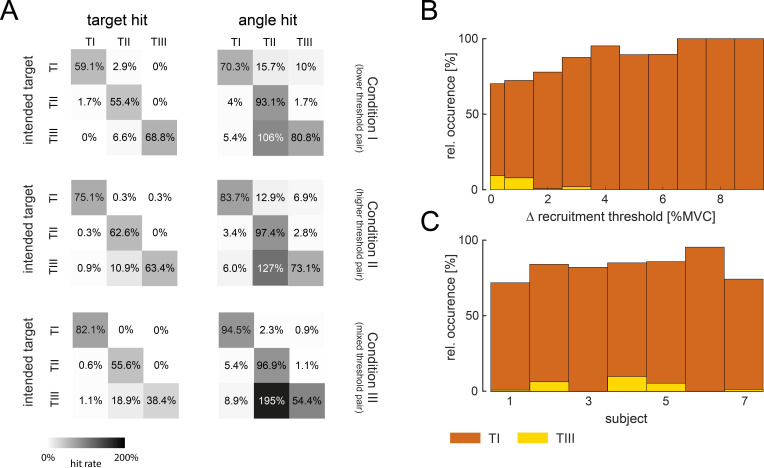
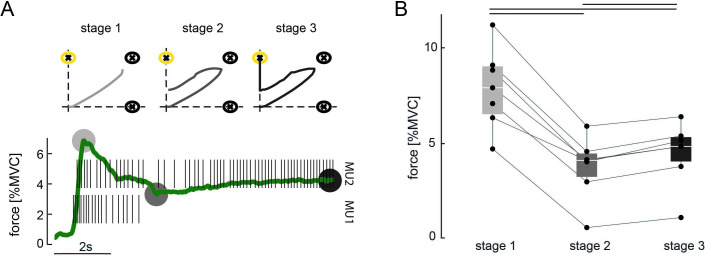
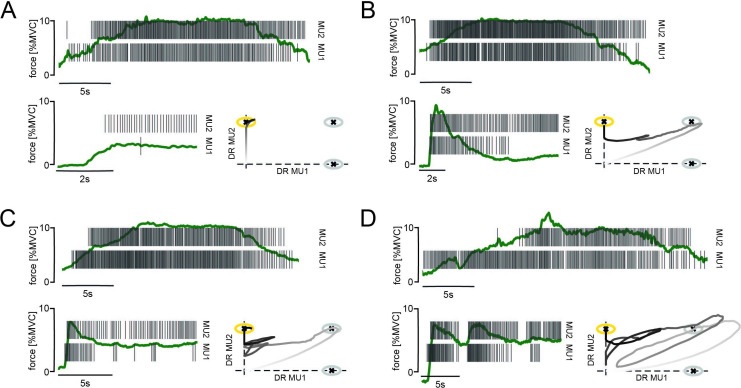
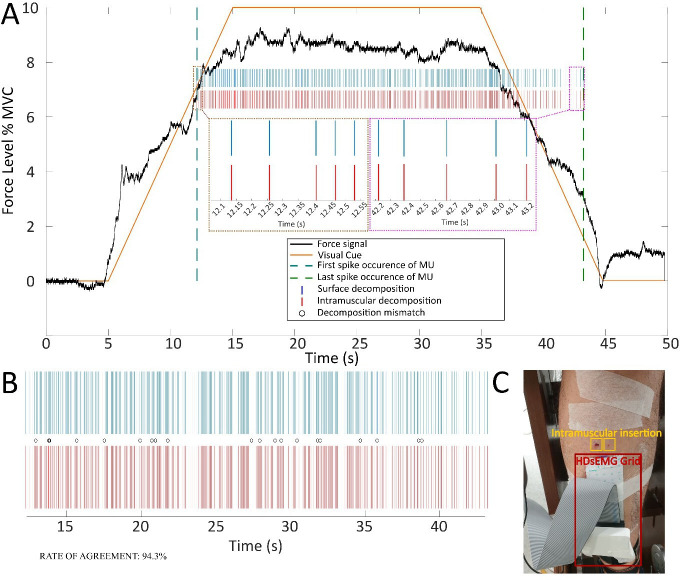
Recent developments in neural interfaces enable the real-time and non-invasive tracking of motor neuron spiking activity. Such novel interfaces could provide a promising basis for human motor augmentation by extracting potentially high-dimensional control signals directly from the human nervous system. However, it is unclear how flexibly humans can control the activity of individual motor neurons to effectively increase the number of degrees of freedom available to coordinate multiple effectors simultaneously. Here, we provided human subjects (N = 7) with real-time feedback on the discharge patterns of pairs of motor units (MUs) innervating a single muscle (tibialis anterior) and encouraged them to independently control the MUs by tracking targets in a 2D space. Subjects learned control strategies to achieve the target-tracking task for various combinations of MUs. These strategies rarely corresponded to a volitional control of independent input signals to individual MUs during the onset of neural activity. Conversely, MU activation was consistent with a common input to the MU pair, while individual activation of the MUs in the pair was predominantly achieved by alterations in de-recruitment order that could be explained by history-dependent changes in motor neuron excitability. These results suggest that flexible MU recruitment based on independent synaptic inputs to single MUs is unlikely, although de-recruitment might reflect varying inputs or modulations in the neuron's intrinsic excitability.
Keywords: common synaptic input; human; motor control; motor unit; neuroscience; real-time decomposition.
© 2022, Bräcklein et al.
Conflict of interest statement
MB, DB, JI, JE, EB, CM, DF No competing interests declared
Figures
References
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Research Materials
