

Compact light field photography towards versatile three-dimensional vision
- PMID: 35680933
- PMCID: PMC9184585
- DOI: 10.1038/s41467-022-31087-9
Compact light field photography towards versatile three-dimensional vision
Abstract
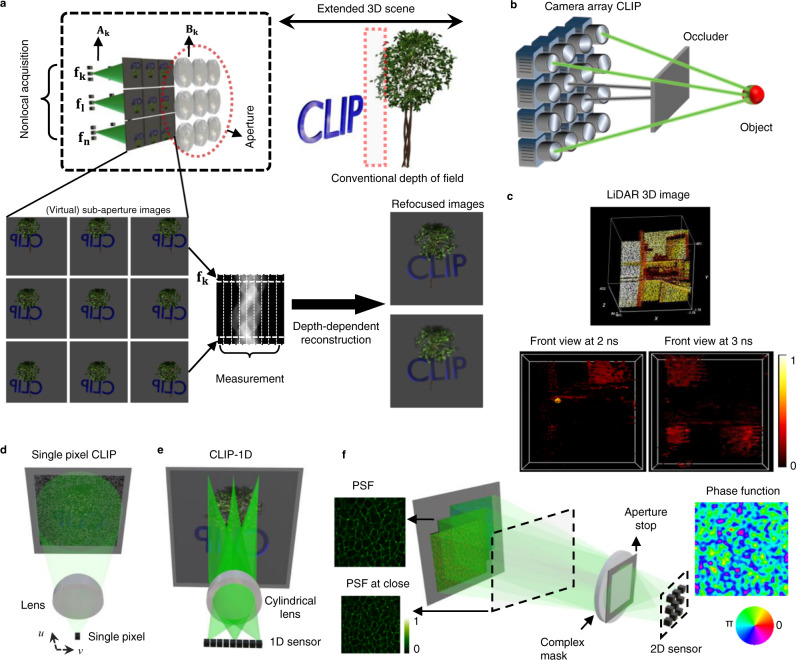
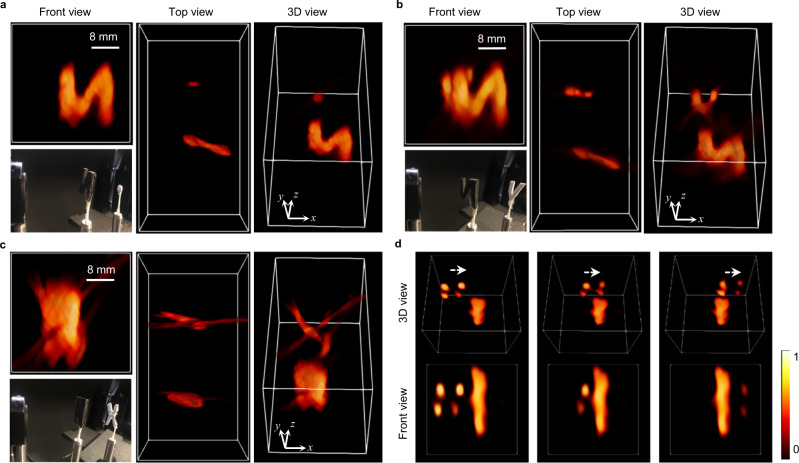
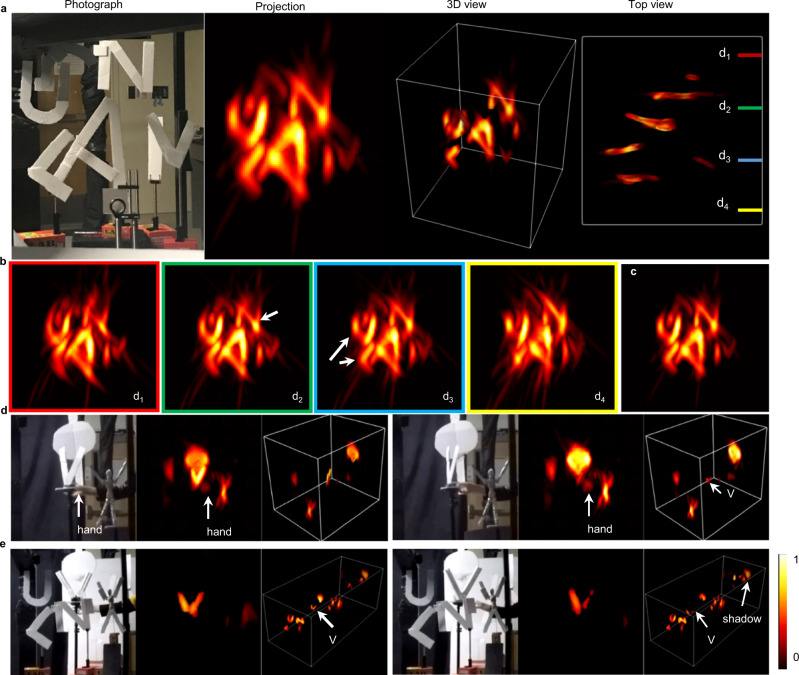
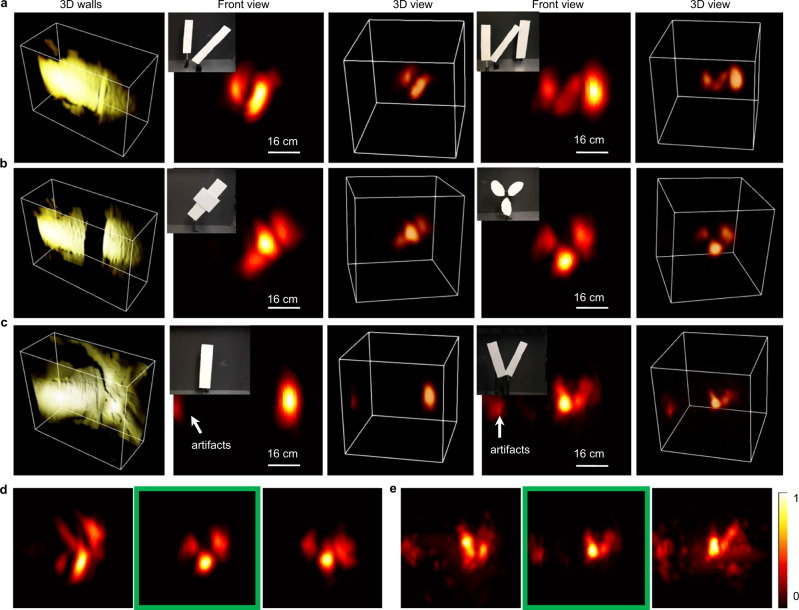
Inspired by natural living systems, modern cameras can attain three-dimensional vision via multi-view geometry like compound eyes in flies, or time-of-flight sensing like echolocation in bats. However, high-speed, accurate three-dimensional sensing capable of scaling over an extensive distance range and coping well with severe occlusions remains challenging. Here, we report compact light field photography for acquiring large-scale light fields with simple optics and a small number of sensors in arbitrary formats ranging from two-dimensional area to single-point detectors, culminating in a dense multi-view measurement with orders of magnitude lower dataload. We demonstrated compact light field photography for efficient multi-view acquisition of time-of-flight signals to enable snapshot three-dimensional imaging with an extended depth range and through severe scene occlusions. Moreover, we show how compact light field photography can exploit curved and disconnected surfaces for real-time non-line-of-sight 3D vision. Compact light field photography will broadly benefit high-speed 3D imaging and open up new avenues in various disciplines.
© 2022. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- Yokoyama, A. 3D imaging sensing technology. In ACM SIGGRAPH 97 Visual Proceedings: the Art and Interdisciplinary Programs of SIGGRAPH ’97 (eds Pocock, L., Hopkins, R., Ebert, D. S. & Crow, J.) 114–115 (ACM, 1997).
-
- Faccio D, Velten A, Wetzstein G. Non-line-of-sight imaging. Nat. Rev. Phys. 2020;2:318–327. doi: 10.1038/s42254-020-0174-8. - DOI
