

Assessment of a Passive Lumbar Exoskeleton in Material Manual Handling Tasks under Laboratory Conditions
- PMID: 35684682
- PMCID: PMC9185583
- DOI: 10.3390/s22114060
Assessment of a Passive Lumbar Exoskeleton in Material Manual Handling Tasks under Laboratory Conditions
Abstract
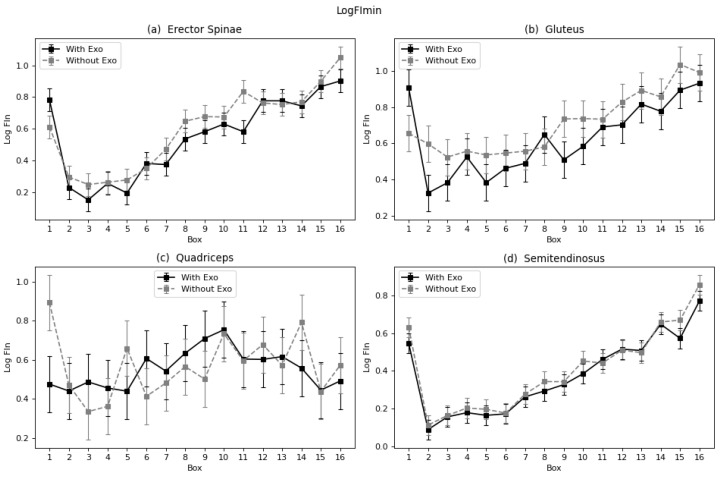
Manual material handling tasks in industry cause work-related musculoskeletal disorders. Exoskeletons are being introduced to reduce the risk of musculoskeletal injuries. This study investigated the effect of using a passive lumbar exoskeleton in terms of moderate ergonomic risk. Eight participants were monitored by electromyogram (EMG) and motion capture (MoCap) while performing tasks with and without the lumbar exoskeleton. The results showed a significant reduction in the root mean square (VRMS) for all muscles tracked: erector spinae (8%), semitendinosus (14%), gluteus (5%), and quadriceps (10.2%). The classic fatigue parameters showed a significant reduction in the case of the semitendinosus: 1.7% zero-crossing rate, 0.9% mean frequency, and 1.12% median frequency. In addition, the logarithm of the normalized Dimitrov's index showed reductions of 11.5, 8, and 14% in erector spinae, semitendinosus, and gluteus, respectively. The calculation of range of motion in the relevant joints demonstrated significant differences, but in almost all cases, the differences were smaller than 10%. The findings of the study indicate that the passive exoskeleton reduces muscle activity and introduces some changes of strategies for motion. Thus, EMG and MoCap appear to be appropriate measurements for designing an exoskeleton assessment procedure.
Keywords: EMG; exoskeleton; fatigue; lumbar; manual material handling; motion-tracking.
Conflict of interest statement
The authors declare no conflict of interest.
Figures













References
-
- Bureau of Labour Statistics Nonfatal Occupational Injuries and Illnesses Requiring Days Away from Work. [(accessed on 23 May 2022)];2016 Available online: https://www.bls.gov/news.release/osh2.toc.htm.
-
- Colim A., Faria C., Braga A.C., Sousa N., Rocha L., Carneiro P., Costa N., Arezes P. Towards an Ergonomic Assessment Framework for Industrial Assembly Workstations—A Case Study. Appl. Sci. 2020;10:3048. doi: 10.3390/app10093048. - DOI
-
- Rossi D., Bertoloni E., Fenaroli M., Marciano F., Alberti M. A multi-criteria ergonomic and performance methodology for evaluating alternatives in “manuable” material handling. Int. J. Ind. Ergon. 2013;43:314–327. doi: 10.1016/j.ergon.2013.04.009. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
