

A Compliance-Reactance Framework for Evaluating Human-Robot Interaction
- PMID: 35685618
- PMCID: PMC9171073
- DOI: 10.3389/frobt.2022.733504
A Compliance-Reactance Framework for Evaluating Human-Robot Interaction
Abstract
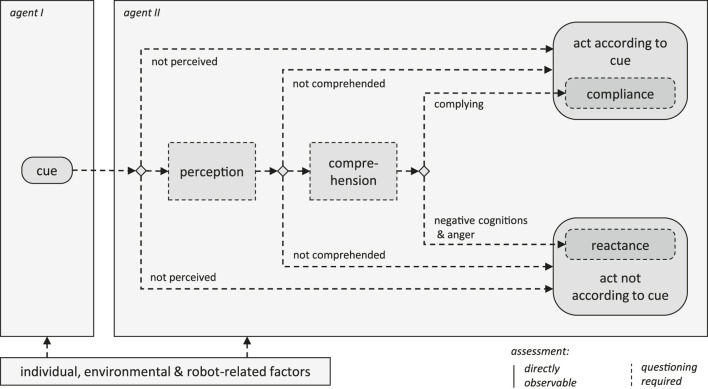
When do we follow requests and recommendations and which ones do we choose not to comply with? This publication combines definitions of compliance and reactance as behaviours and as affective processes in one model for application to human-robot interaction. The framework comprises three steps: human perception, comprehension, and selection of an action following a cue given by a robot. The paper outlines the application of the model in different study settings such as controlled experiments that allow for the assessment of cognition as well as observational field studies that lack this possibility. Guidance for defining and measuring compliance and reactance is outlined and strategies for improving robot behaviour are derived for each step in the process model. Design recommendations for each step are condensed into three principles on information economy, adequacy, and transparency. In summary, we suggest that in order to maximise the probability of compliance with a cue and to avoid reactance, interaction designers should aim for a high probability of perception, a high probability of comprehension and prevent negative affect. Finally, an example application is presented that uses existing data from a laboratory experiment in combination with data collected in an online survey to outline how the model can be applied to evaluate a new technology or interaction strategy using the concepts of compliance and reactance as behaviours and affective constructs.
Keywords: compliance; human-robot interaction; reactance; robotics; trust.
Copyright © 2022 Boos, Herzog, Reinhardt, Bengler and Zimmermann.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures



References
-
- Agnihotri R., Gaur S. (2016). Robotics: A New Paradigm in Geriatric Healthcare. Gerontechnology 15, 146–161. 10.4017/gt.2016.15.3.004.00 - DOI
-
- Backhaus N., Rosen P. H., Scheidig A., Gross H.-M., Wischniewski S. (2018). “Somebody Help Me, Please?!” Interaction Design Framework for Needy Mobile Service Robots,” in 2018 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO) (Genova, Italy: IEEE; ), 54–61.
-
- Bartneck C., Nomura T., Kanda T., Suzuki T., Kennsuke K. (2005). “A Cross-Cultural Study on Attitudes towards Robots,” in Proceedings of the HCI International, Las Vegas (Mahwah: Lawrence Erlbaum Associates; ).
LinkOut - more resources
Full Text Sources