

Spinning-enabled wireless amphibious origami millirobot
- PMID: 35701405
- PMCID: PMC9198078
- DOI: 10.1038/s41467-022-30802-w
Spinning-enabled wireless amphibious origami millirobot
Abstract
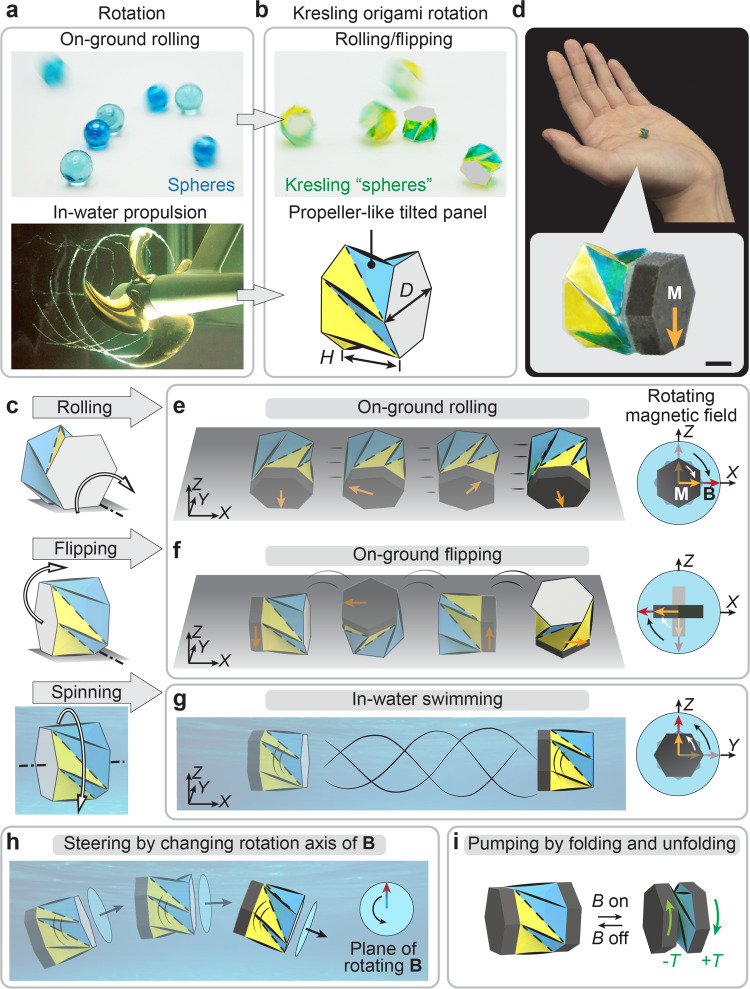
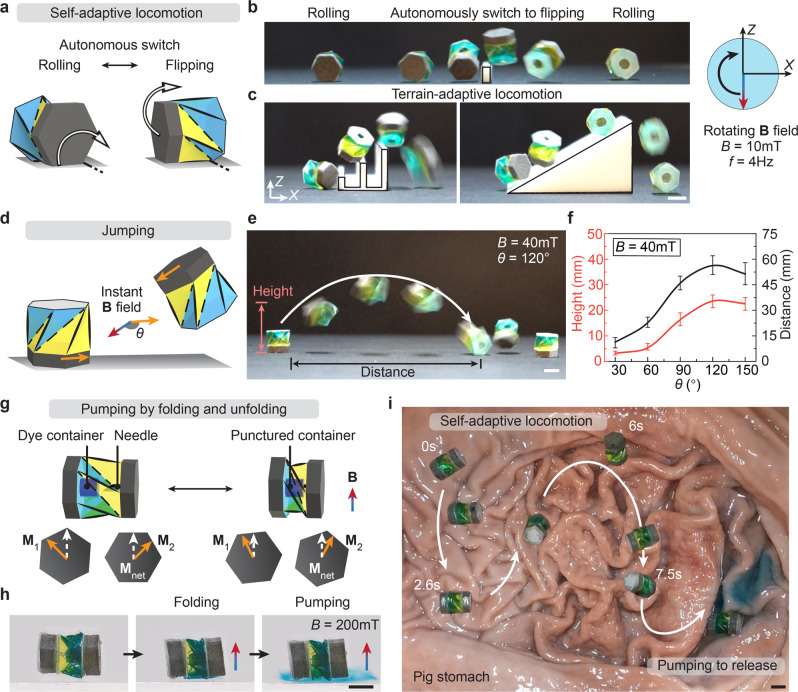
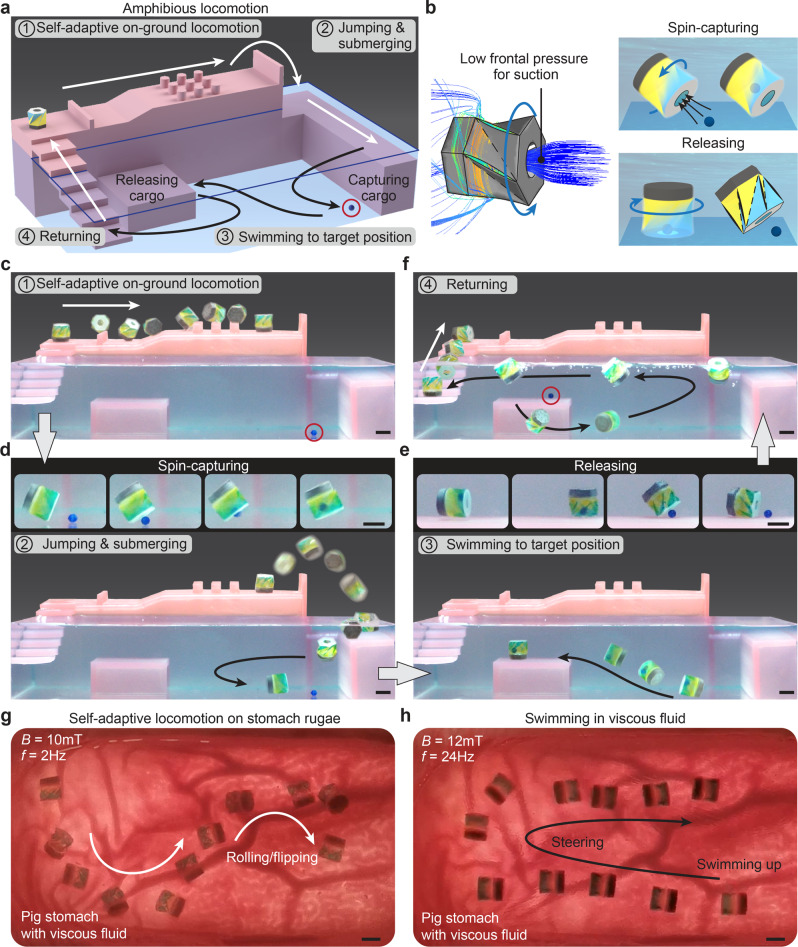
Wireless millimeter-scale origami robots have recently been explored with great potential for biomedical applications. Existing millimeter-scale origami devices usually require separate geometrical components for locomotion and functions. Additionally, none of them can achieve both on-ground and in-water locomotion. Here we report a magnetically actuated amphibious origami millirobot that integrates capabilities of spinning-enabled multimodal locomotion, delivery of liquid medicine, and cargo transportation with wireless operation. This millirobot takes full advantage of the geometrical features and folding/unfolding capability of Kresling origami, a triangulated hollow cylinder, to fulfill multifunction: its geometrical features are exploited for generating omnidirectional locomotion in various working environments through rolling, flipping, and spinning-induced propulsion; the folding/unfolding is utilized as a pumping mechanism for controlled delivery of liquid medicine; furthermore, the spinning motion provides a sucking mechanism for targeted solid cargo transportation. We anticipate the amphibious origami millirobots can potentially serve as minimally invasive devices for biomedical diagnoses and treatments.
© 2022. The Author(s).
Conflict of interest statement
A provisional patent has been filed.
Figures

References
-
- Rus D, Tolley MT. Design, fabrication and control of origami robots. Nat. Rev. Mater. 2018;3:101–112. doi: 10.1038/s41578-018-0009-8. - DOI
-
- Bolaños Quiñones VA, Zhu H, Solovev AA, Mei Y, Gracias DH. Origami biosystems: 3D assembly methods for biomedical applications. Adv. Biosyst. 2018;2:1800230. doi: 10.1002/adbi.201800230. - DOI
-
- Boyvat, M., Koh, J.-S. & Wood, R. J. Addressable wireless actuation for multijoint folding robots and devices. Sci. Robot.2, eaan1544 (2017). - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
