

Untethered small-scale magnetic soft robot with programmable magnetization and integrated multifunctional modules
- PMID: 35731876
- PMCID: PMC9217092
- DOI: 10.1126/sciadv.abn8932
Untethered small-scale magnetic soft robot with programmable magnetization and integrated multifunctional modules
Abstract
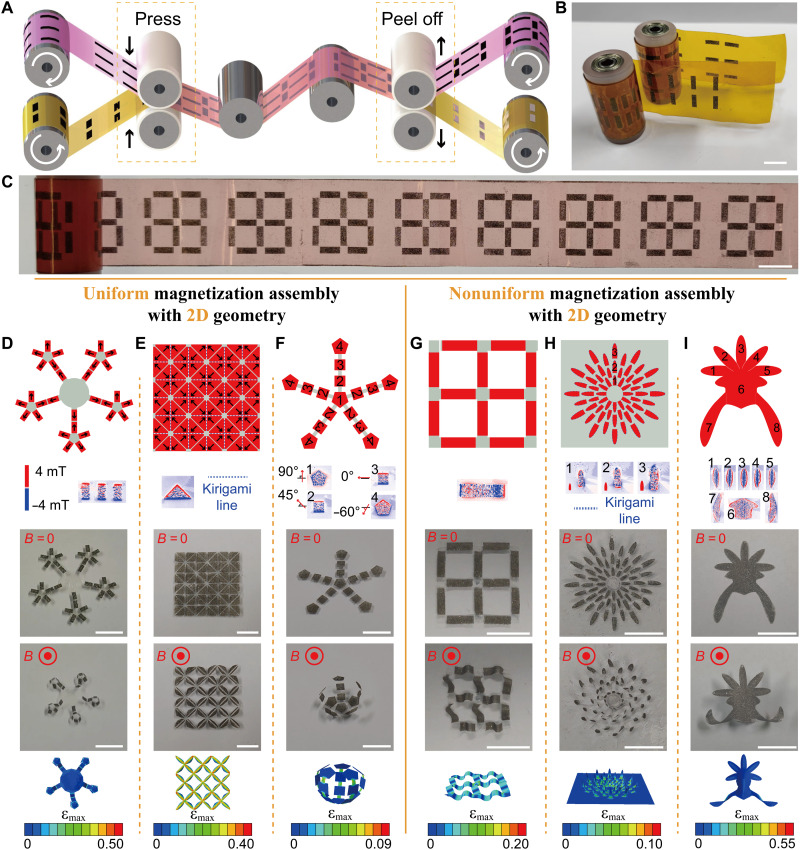
Intelligent magnetic soft robots capable of programmable structural changes and multifunctionality modalities depend on material architectures and methods for controlling magnetization profiles. While some efforts have been made, there are still key challenges in achieving programmable magnetization profile and creating heterogeneous architectures. Here, we directly embed programmed magnetization patterns (magnetization modules) into the adhesive sticker layers to construct soft robots with programmable magnetization profiles and geometries and then integrate spatially distributed functional modules. Functional modules including temperature and ultraviolet light sensing particles, pH sensing sheets, oil sensing foams, positioning electronic component, circuit foils, and therapy patch films are integrated into soft robots. These test beds are used to explore multimodal robot locomotion and various applications related to environmental sensing and detection, circuit repairing, and gastric ulcer coating, respectively. This proposed approach to engineering modular soft material systems has the potential to expand the functionality, versatility, and adaptability of soft robots.
Figures






References
-
- Hu W., Lum G. Z., Mastrangeli M., Sitti M., Small-scale soft-bodied robot with multimodal locomotion. Nature 554, 81–85 (2018). - PubMed
-
- Xu T., Zhang J., Salehizadeh M., Onaizah O., Diller E., Millimeter-scale flexible robots with programmable three-dimensional magnetization and motions. Sci. Robot. 4, eaav4494 (2019). - PubMed
-
- Li C., Lau G. C., Yuan H., Aggarwal A., Dominguez V. L., Liu S., Sai H., Palmer L. C., Sather N. A., Pearson T. J., Freedman D. E., Amiri P. K., De La Cruz M. O., Stupp S. I., Fast and programmable locomotion of hydrogel-metal hybrids under light and magnetic fields. Sci. Robot. 5, eabb9822 (2020). - PubMed
LinkOut - more resources
Full Text Sources
Other Literature Sources
