

Design and Experimental Research of 3-RRS Parallel Ankle Rehabilitation Robot
- PMID: 35744564
- PMCID: PMC9228808
- DOI: 10.3390/mi13060950
Design and Experimental Research of 3-RRS Parallel Ankle Rehabilitation Robot
Abstract
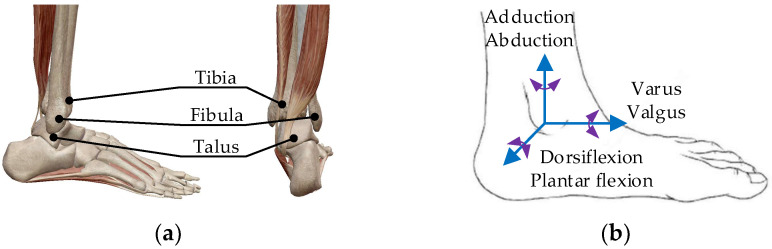
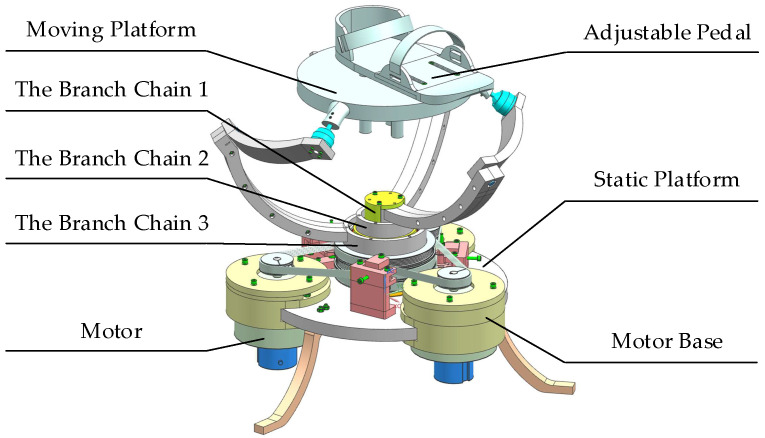
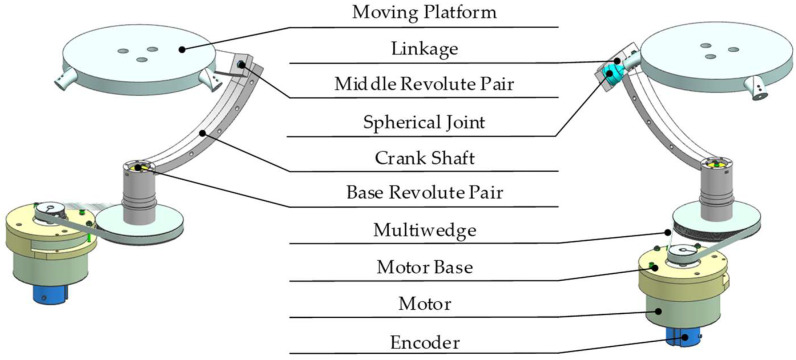
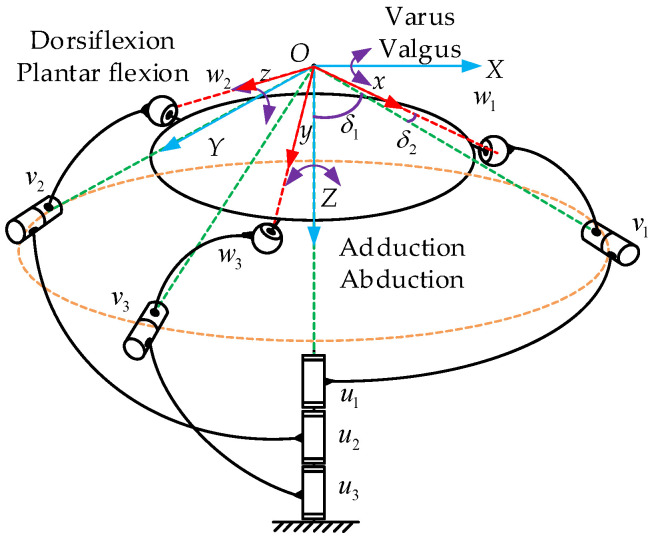
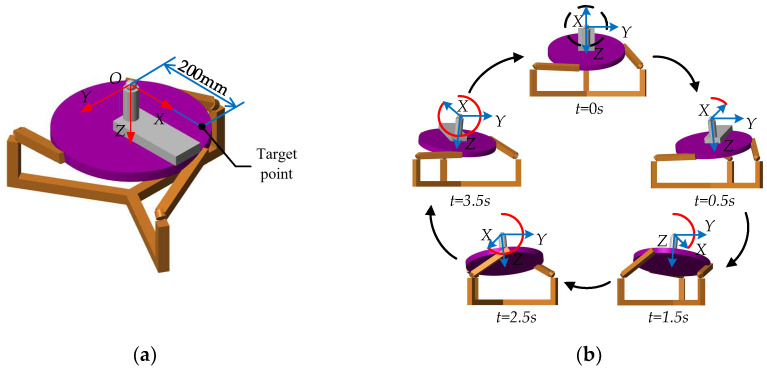
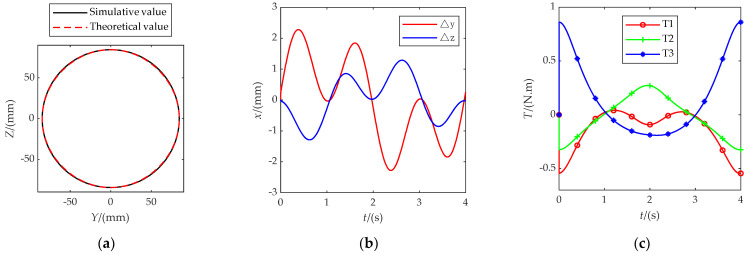
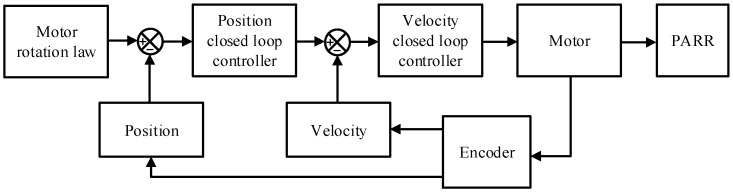
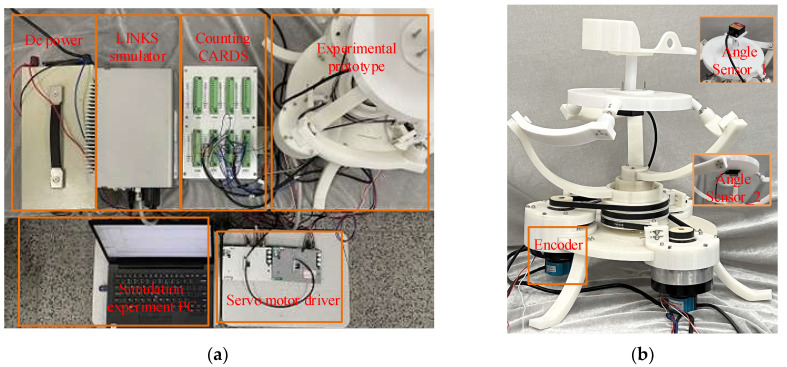
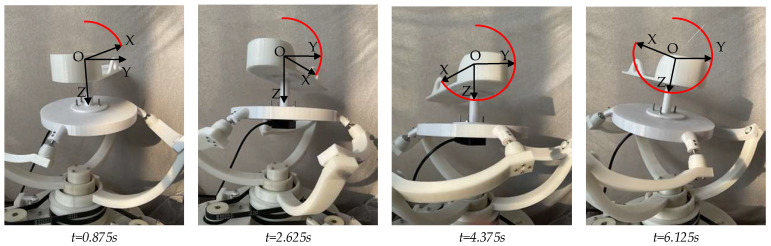
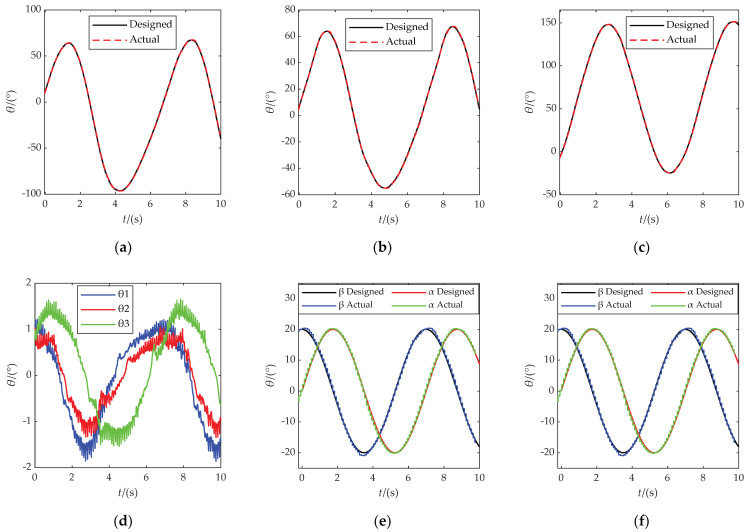
The ankle is a crucial joint that supports the human body weight. An ankle sprain will adversely affect the patient's daily life, so it is of great significance to ensure its strength. To help patients with ankle dysfunction to carry out effective rehabilitation training, the bone structure and motion mechanism of the ankle were analyzed in this paper. Referring to the configuration of the lower-mobility parallel mechanism, a 3-RRS (R and S denote revolute and spherical joint respectively) parallel ankle rehabilitation robot (PARR) was proposed. The robot can realize both single and compound ankle rehabilitation training. The structure of the robot was introduced, and the kinematics model was established. The freedom of movement of the robot was analyzed using the screw theory, and the robot kinematics were analyzed using spherical analytics theory. A circular composite rehabilitation trajectory was planned, and the accuracy of the kinematics model was verified by virtual prototype simulation. The Multibody simulation results show that the trajectory of the target point is basically the same as the expected trajectory. The maximum trajectory error is about 2.5 mm in the simulation process, which is within the controllable range. The experimental results of the virtual prototype simulation show that the maximum angular deflection error of the three motors is 2° when running a circular trajectory, which meets the experimental requirements. Finally, a control strategy for passive rehabilitation training was designed, and the effectiveness of this control strategy was verified by a prototype experiment.
Keywords: ankle rehabilitation; parallel mechanism; prototype experiment; simulation analysis.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Kim S., Kim Y. The Effects of Vibration Exercise after Modified Bröstrom Operation in Soccer Players with Ankle Instability. J. Int. Acad. Phys. Ther. Res. 2019;10:1791–1796. doi: 10.20540/JIAPTR.2019.10.2.1791. - DOI
-
- Shi M., Yang C., Zhang D. A Novel Human-Machine Collaboration Model of an Ankle Joint Rehabilitation Robot Driven by EEG Signals. Math. Probl. Eng. 2021;2021:5564235. doi: 10.1155/2021/5564235. - DOI
Grants and funding
- 51705534/National Natural Science Foundation of China
- 18CX02085A/Fundamental Research Funds for the Central Universities
- 2017CXGC0902/Key Scientific and Technological Innovation Project of Shandong Provincial
- ZR2016EEB12/Shandong Provincial Natural Science Foundation
- 2018CFB313/Hubei Provincial Natural Science Foundation
LinkOut - more resources
Full Text Sources
