

Introducing the New Surgical Robot HUGO™ RAS: System Description and Docking Settings for Gynecological Surgery
- PMID: 35756633
- PMCID: PMC9218341
- DOI: 10.3389/fonc.2022.898060
Introducing the New Surgical Robot HUGO™ RAS: System Description and Docking Settings for Gynecological Surgery
Abstract
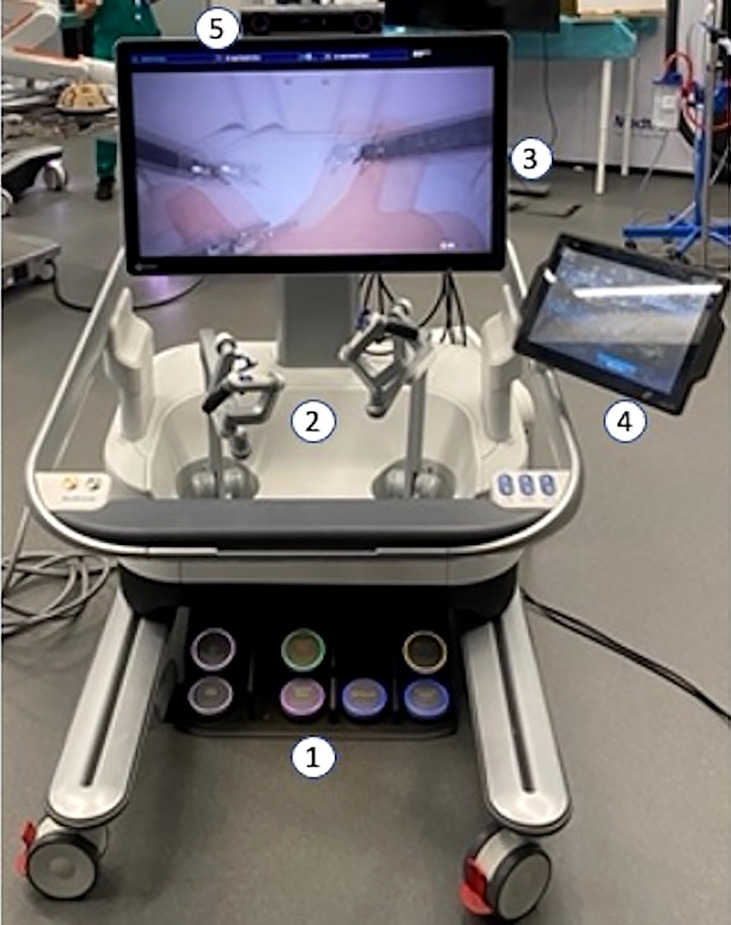
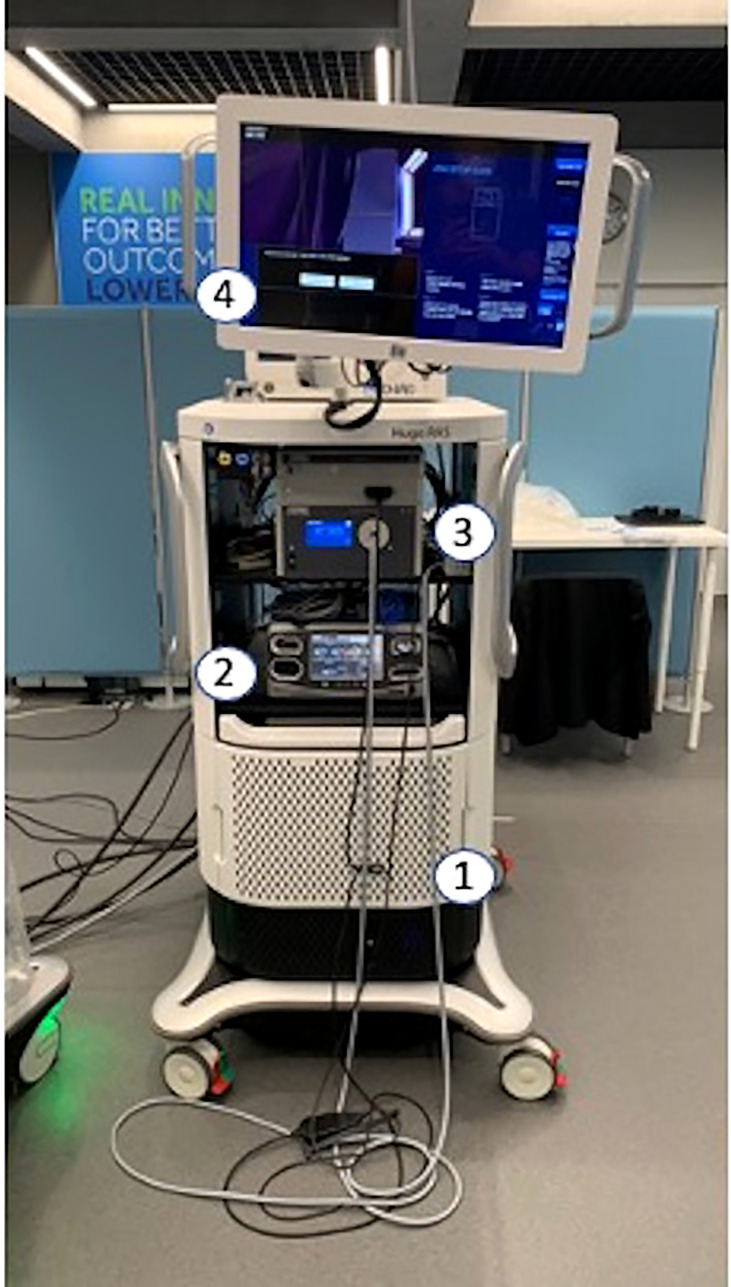
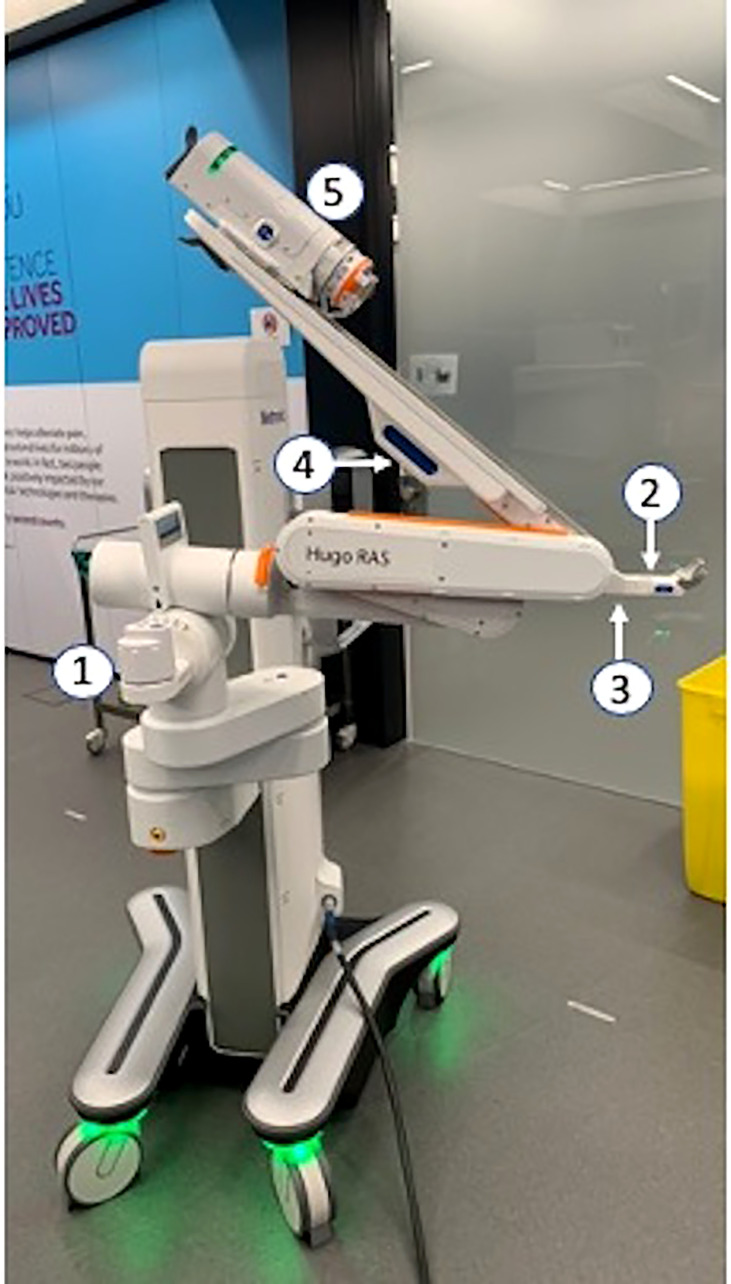
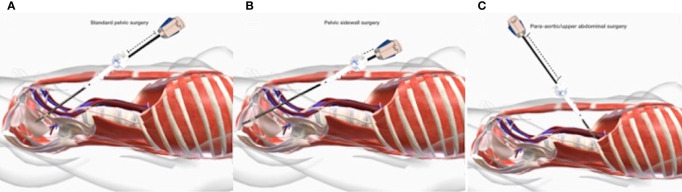
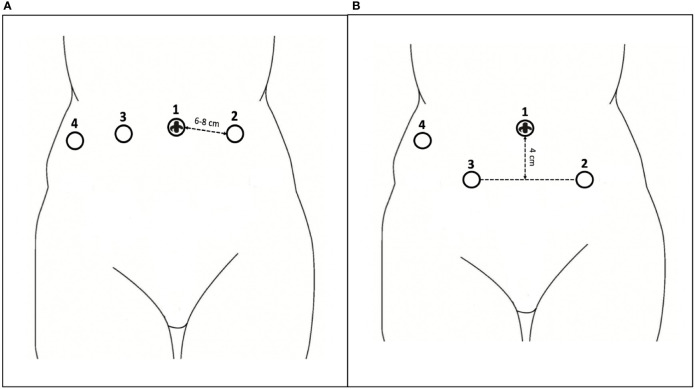
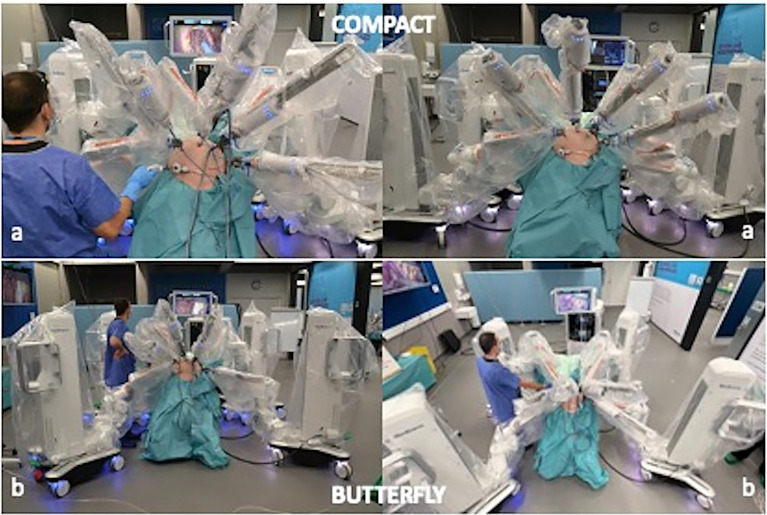
This study provides a detailed description of the new HUGO™ RAS System and suggests docking settings for gynecological surgery. The system is composed of an "open" surgical console with an HD-3D passive display, a system tower, and four arm carts. Each arm has an extremely wide range of adaptability resulting from the numerous joints. The human cadaver labs were performed at the ORSI Academy between August and December 2021. All procedures were performed by two surgical teams, each composed of a high-volume surgeon experienced in robotic surgery, gynecologic oncology, and pelvic sidewall surgery, and one bedside assistant. Three main gynecological surgical scenarios were identified: standard pelvic surgery, pelvic sidewall surgery, and para-aortic/upper abdominal surgery. Concerning the port placement, the chosen options were called "straight" and "bridge"; instead, the so-called "compact" and "butterfly" configurations were identified for the arm cart positioning. Four cadavers were used to perform total hysterectomy, radical hysterectomy, pelvic exenteration, pelvic and para-aortic lymphadenectomy, and omentectomy. We performed several tests, identifying the best system configurations to draw the proper efficiency from the flexibility of the system in all gynecological surgical scenarios. The straight port placement seems to be adequate for standard pelvic surgery. The bridge trocar position is best to reach the deeper and lateral anatomical regions of the female pelvis. The compact and butterfly arm cart allocations are adequate for both straight and bridge port placement. When deep pelvic surgery was performed, the bedside assistant became more proficient by working with a standard laparoscopic instrument from an ancillary port placed in the left iliac fossa. The arm carts needed to be moved in an open manner, like for the proposed butterfly configuration. On the contrary, the compact disposition left enough space to assist from Palmer's point port. Several basic and advanced gynecological surgical procedures were performed and completed successfully without encountering any technical or surgical issue, the results obtained were judged sufficient to proceed with the clinical experience in daily practice. The HUGO™ RAS system is flexible and highly performative in various surgical scenarios.
Keywords: HUGO™ RAS; docking; gynecological surgery; radical hysterectomy; robotic-assisted surgery (RAS); robotics.
Copyright © 2022 Gueli Alletti, Chiantera, Arcuri, Gioè, Oliva, Monterossi, Fanfani, Fagotti and Scambia.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures
References
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical