

Embodiment of supernumerary robotic limbs in virtual reality
- PMID: 35760810
- PMCID: PMC9237069
- DOI: 10.1038/s41598-022-13981-w
Embodiment of supernumerary robotic limbs in virtual reality
Abstract
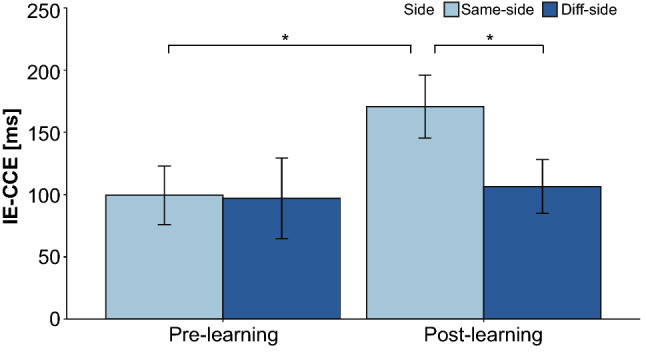
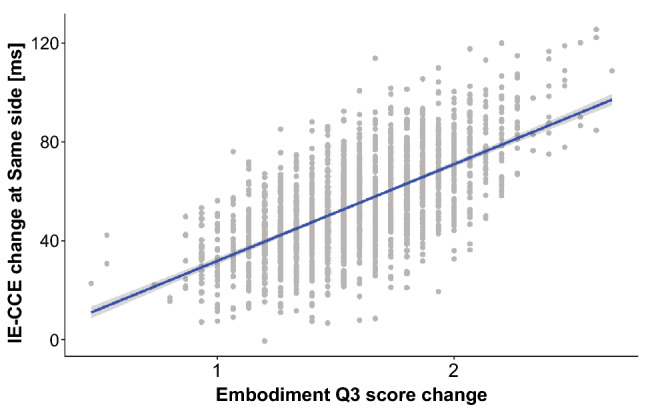
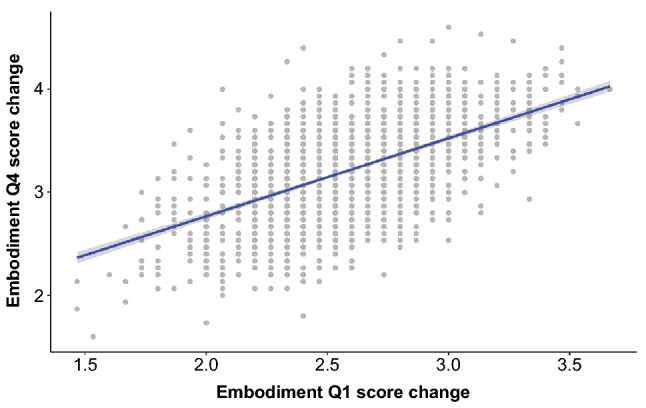
The supernumerary robotic limb system expands the motor function of human users by adding extra artificially designed limbs. It is important for us to embody the system as if it is a part of one's own body and to maintain cognitive transparency in which the cognitive load is suppressed. Embodiment studies have been conducted with an expansion of bodily functions through a "substitution" and "extension". However, there have been few studies on the "addition" of supernumerary body parts. In this study, we developed a supernumerary robotic limb system that operates in a virtual environment, and then evaluated whether the extra limb can be regarded as a part of one's own body using a questionnaire and whether the perception of peripersonal space changes with a visuotactile crossmodal congruency task. We found that the participants can embody the extra-limbs after using the supernumerary robotic limb system. We also found a positive correlation between the perceptual change in the crossmodal congruency task and the subjective feeling that the number of one's arms had increased (supernumerary limb sensation). These results suggest that the addition of an extra body part may cause the participants to feel that they had acquired a new body part that differs from their original body part through a functional expansion.
© 2022. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures



References
-
- Hussain I, Prattichizzo D. Augmenting Human Manipulation Abilities with Supernumerary Robotic Limbs. Springer; 2020.
-
- Tong Y, Liu J. Review of research and development of supernumerary robotic limbs. IEEE/CAA J. Autom. Sin. 2021;8:929–952. doi: 10.1109/JAS.2021.1003961. - DOI
-
- Sasaki T, et al. Emerging Technologies, SIGGRAPH ’17. Association for Computing Machinery; 2017. pp. 1–2.
-
- Fukuoka M, et al. XR, SA ’19. Association for Computing Machinery; 2019. pp. 9–10.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
