

Smart textiles using fluid-driven artificial muscle fibers
- PMID: 35773415
- PMCID: PMC9247081
- DOI: 10.1038/s41598-022-15369-2
Smart textiles using fluid-driven artificial muscle fibers
Abstract
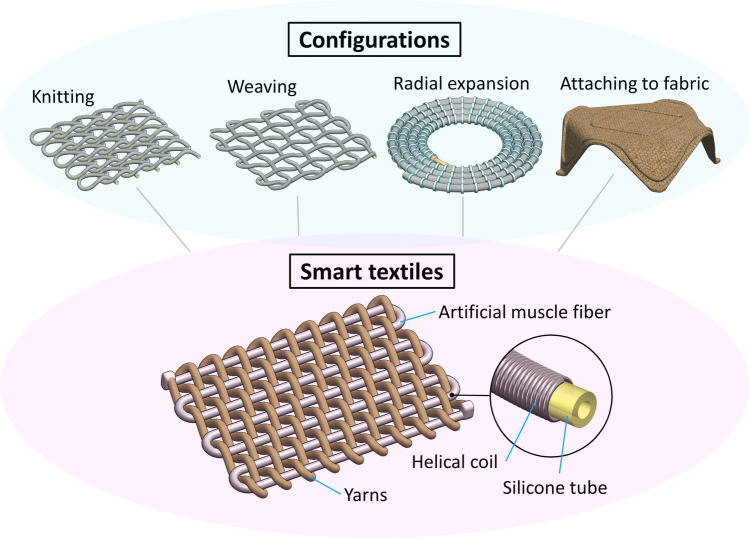
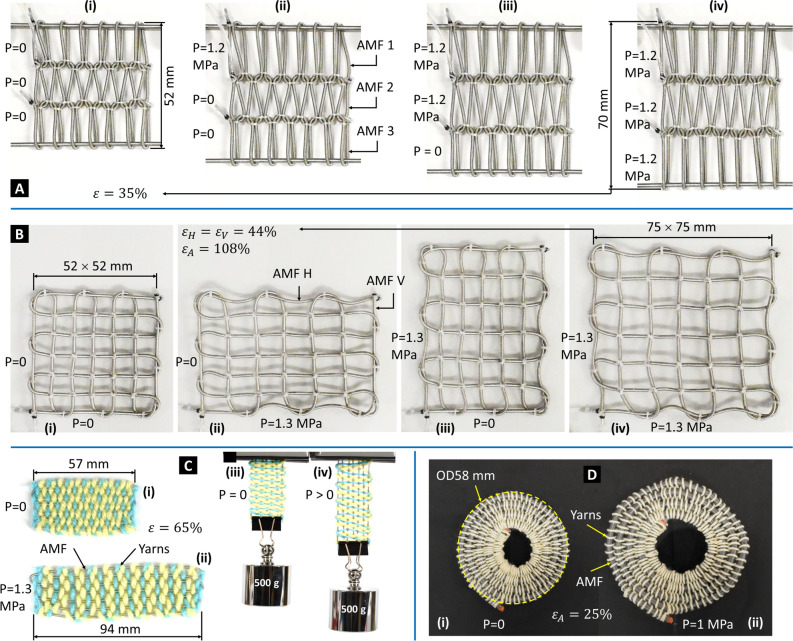
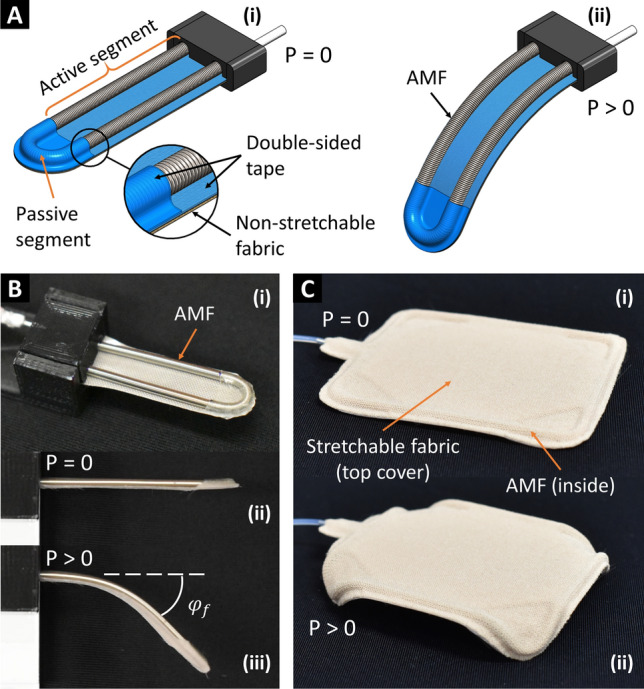
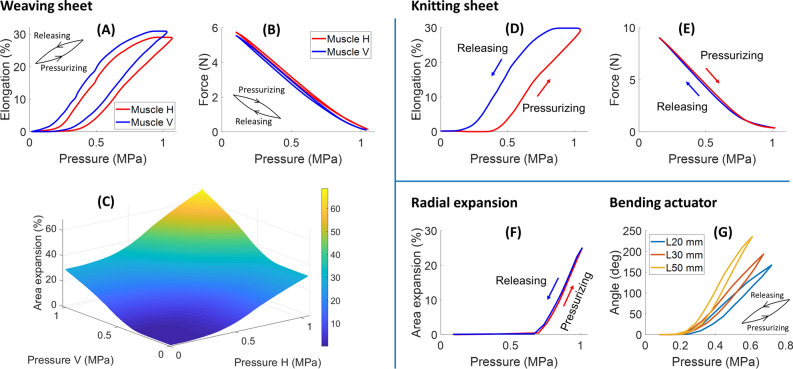
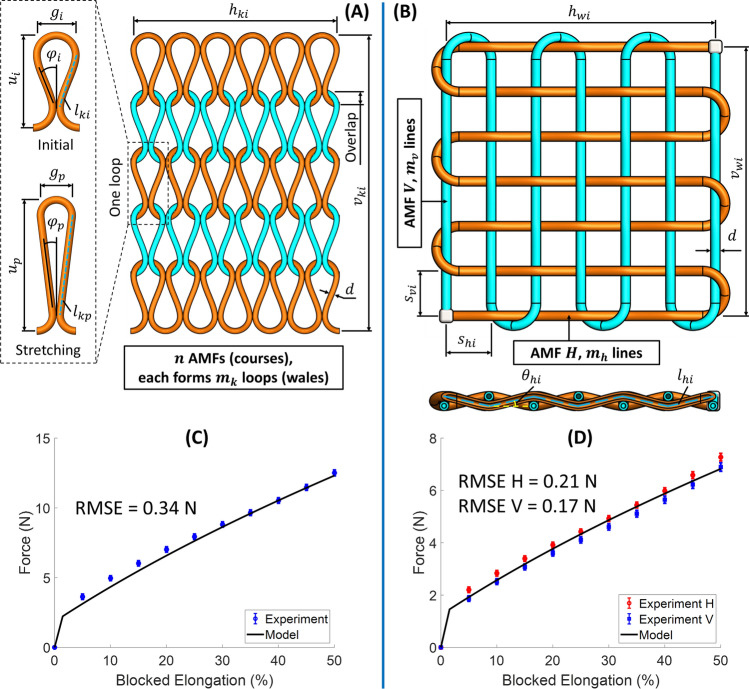
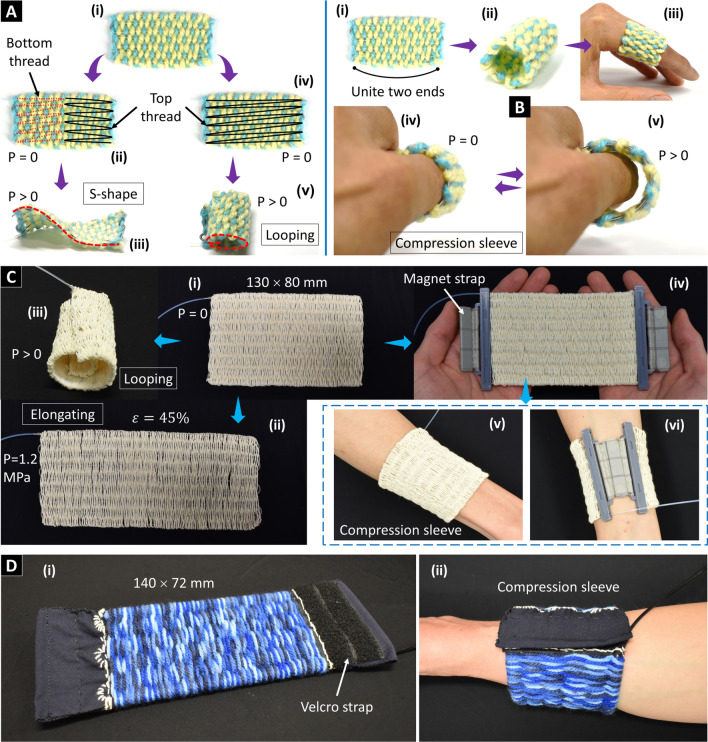
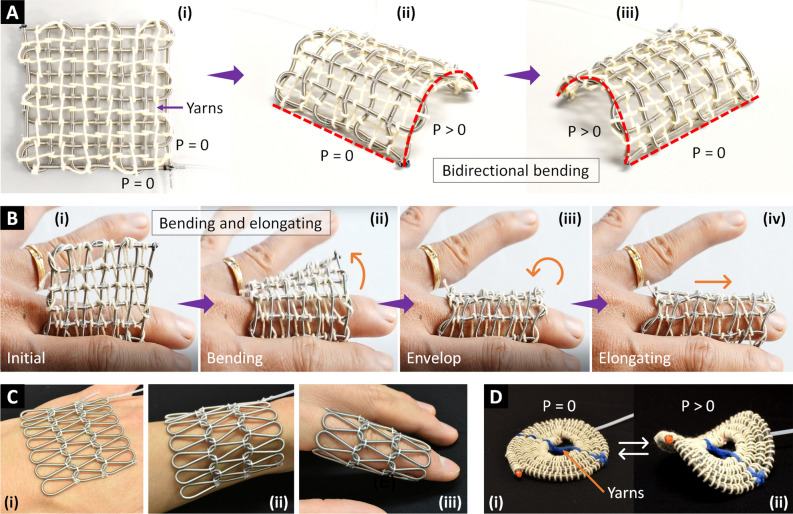
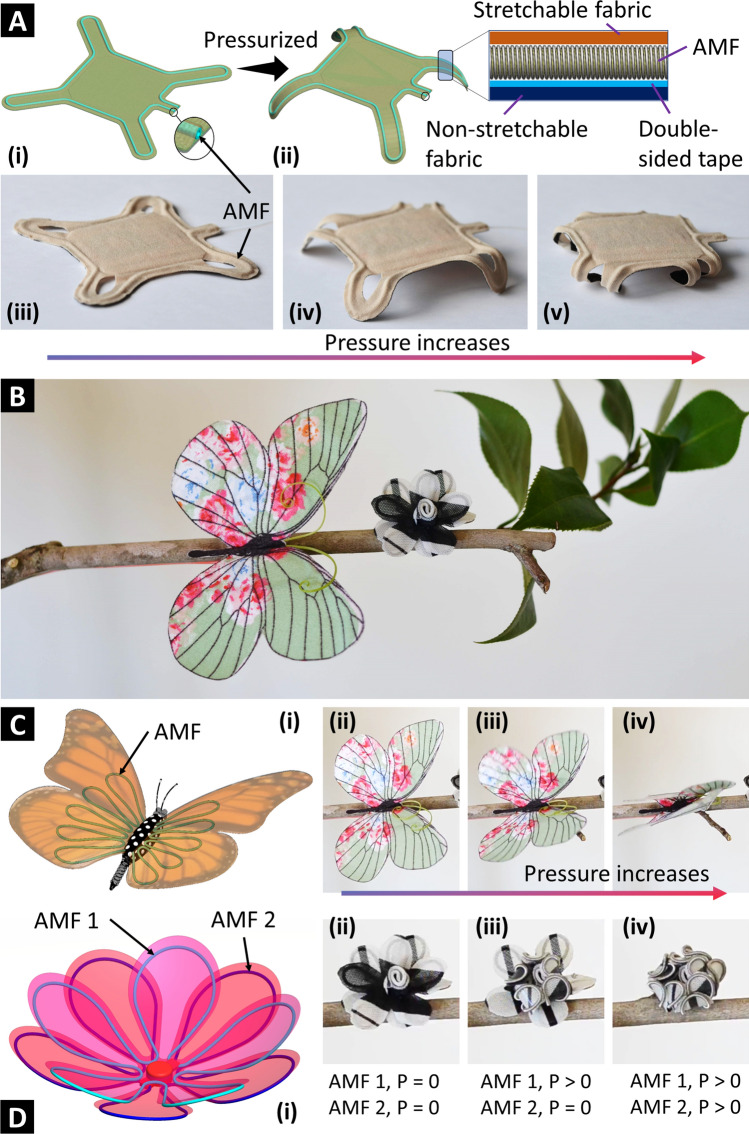
The marriage of textiles with artificial muscles to create smart textiles is attracting great attention from the scientific community and industry. Smart textiles offer many benefits including adaptive comfort and high conformity to objects while providing active actuation for desired motion and force. This paper introduces a new class of programmable smart textiles created from different methods of knitting, weaving, and sticking fluid-driven artificial muscle fibers. Mathematical models are developed to describe the elongation-force relationship of the knitting and weaving textile sheets, followed by experiments to validate the model effectiveness. The new smart textiles are highly flexible, conformable, and mechanically programmable, enabling multimodal motions and shape-shifting abilities for use in broader applications. Different prototypes of the smart textiles are created with experimental validations including various shape-changing instances such as elongation (up to 65%), area expansion (108%), radial expansion (25%), and bending motion. The concept of reconfiguring passive conventional fabrics into active structures for bio-inspired shape-morphing structures is also explored. The proposed smart textiles are expected to contribute to the progression of smart wearable devices, haptic systems, bio-inspired soft robotics, and wearable electronics.
© 2022. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- van Manen T, Janbaz S, Zadpoor AA. Programming the shape-shifting of flat soft matter. Mater. Today. 2018;21:144–163. doi: 10.1016/j.mattod.2017.08.026. - DOI
-
- Zhou J, Sheiko SS. Reversible shape-shifting in polymeric materials. J. Polym. Sci. Pol. Phys. 2016;54:1365–1380. doi: 10.1002/polb.24014. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
