

Crowd flow forecasting via agent-based simulations with sequential latent parameter estimation from aggregate observation
- PMID: 35778445
- PMCID: PMC9249888
- DOI: 10.1038/s41598-022-14646-4
Crowd flow forecasting via agent-based simulations with sequential latent parameter estimation from aggregate observation
Abstract
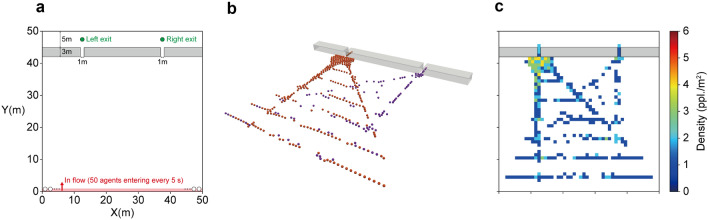
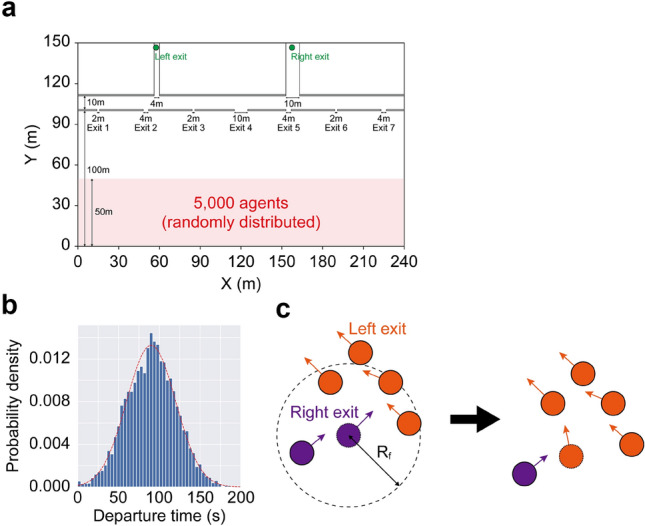
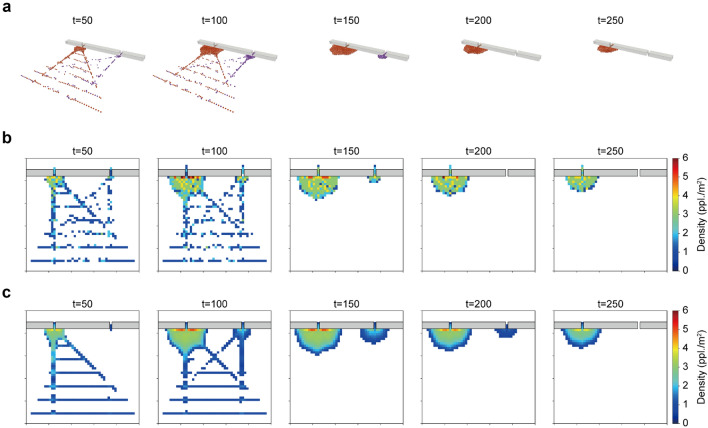
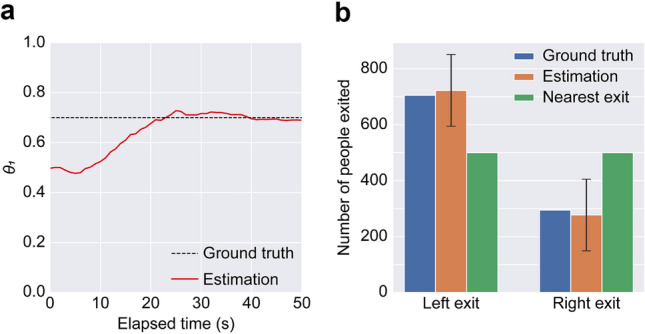
Unlike conventional crowd simulations for what-if analysis, agent-based crowd simulations for real-time applications are an emerging research topic and an important tool for better crowd managements in smart cities. Recent studies have attempted to incorporate the real-time crowd observations into crowd simulations for real-time crowd forecasting and management; however, crowd flow forecasting considering individual-level microscopic interactions, especially for large crowds, is still challenging. Here, we present a method that incorporates crowd observation data to forecast a large crowd flow, including thousands of individuals, using a microscopic agent-based model. By sequentially estimating both the crowd state and the latent parameter behind the crowd flows from the aggregate crowd density observation with the particle filter algorithm, the present method estimates and forecasts the large crowd flow using agent-based simulations that incorporate observation data. Numerical experiments, including a realistic evacuation scenario with 5000 individuals, demonstrated that the present method could successfully provide reasonable crowd flow forecasting for different crowd scenarios, even with limited information on crowd movements. These results support the feasibility of real-time crowd flow forecasting and subsequent crowd management, even for large but microscopic crowd problems.
© 2022. The Author(s).
Conflict of interest statement
F.M. and Y.O. are employees of Fujitsu Limited and have filed a Japanese patent application (No. 2021-205347, pending) in the name of Fujitsu Limited, relating to the crowd forecasting method.
Figures






References
-
- Duives DC, Daamen W, Hoogendoorn SP. State-of-the-art crowd motion simulation models. Transp. Res. Part C Emerg. Technol. 2013;37:193–209. doi: 10.1016/j.trc.2013.02.005. - DOI
-
- Kuligowski, E., Peacock, R. & Hoskins, B. In A Review of Building Evacuation Models 2nd edn. (National Institute of Standards and Technology, Technical Note (NIST TN), 2010).
-
- Mordvintsev, A., Krzhizhanovskaya, V., Lees, M. & Sloot, P. Simulation of city evacuation coupled to flood dynamics. In Pedestrian and Evacuation Dynamics 2012, 485–499 (Springer, 2014).
-
- Makinoshima F, Imamura F, Abe Y. Enhancing a tsunami evacuation simulation for a multi-scenario analysis using parallel computing. Simul. Model. Pract. Theory. 2018;83:36–50. doi: 10.1016/j.simpat.2017.12.016. - DOI
-
- Feng T, Yu L-F, Yeung S-K, Yin K, Zhou K. Crowd-driven mid-scale layout design. ACM Trans. Graph. 2016 doi: 10.1145/2897824.2925894. - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
