

Electroactive Polymer-Based Composites for Artificial Muscle-like Actuators: A Review
- PMID: 35808110
- PMCID: PMC9268644
- DOI: 10.3390/nano12132272
Electroactive Polymer-Based Composites for Artificial Muscle-like Actuators: A Review
Abstract
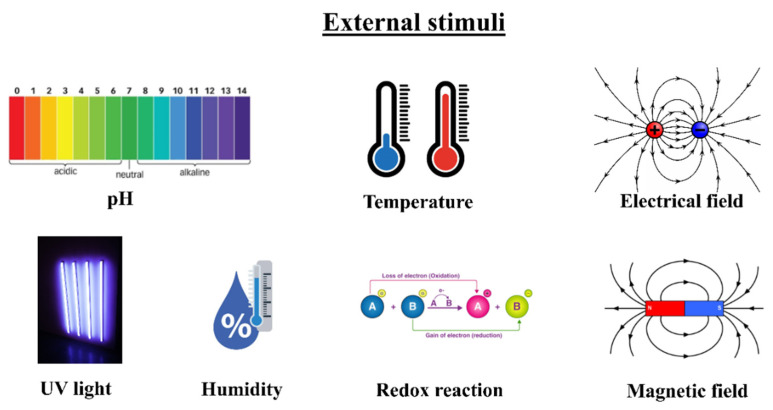
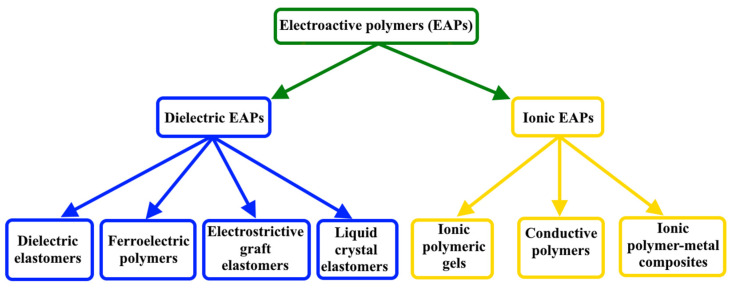
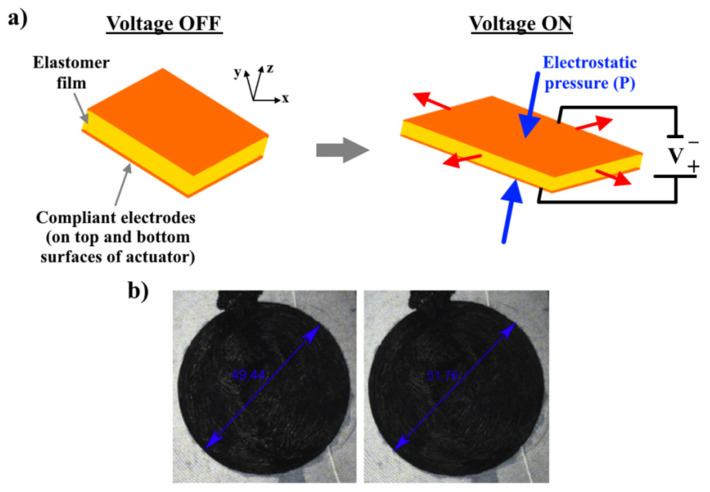
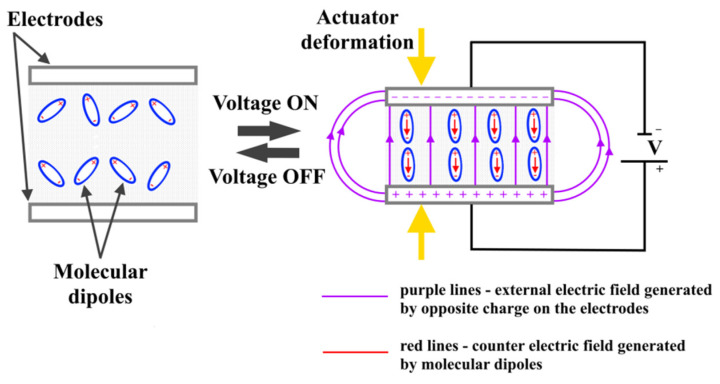
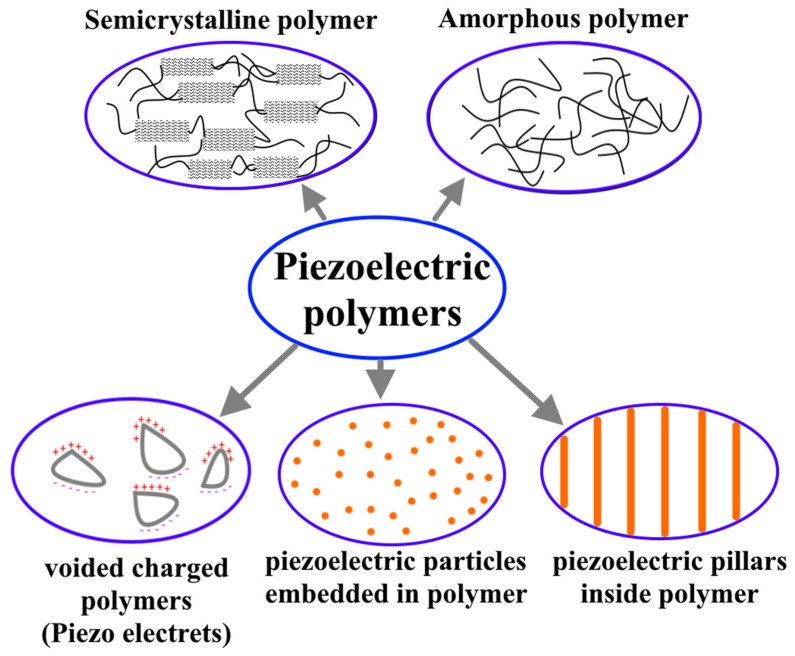
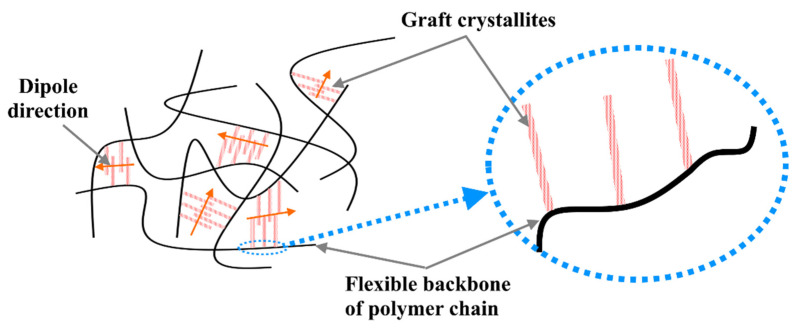
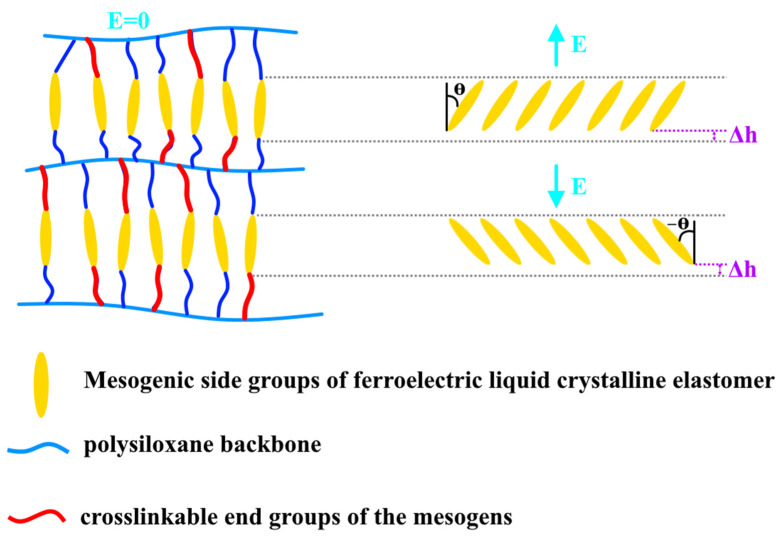
Unlike traditional actuators, such as piezoelectric ceramic or metallic actuators, polymer actuators are currently attracting more interest in biomedicine due to their unique properties, such as light weight, easy processing, biodegradability, fast response, large active strains, and good mechanical properties. They can be actuated under external stimuli, such as chemical (pH changes), electric, humidity, light, temperature, and magnetic field. Electroactive polymers (EAPs), called 'artificial muscles', can be activated by an electric stimulus, and fixed into a temporary shape. Restoring their permanent shape after the release of an electrical field, electroactive polymer is considered the most attractive actuator type because of its high suitability for prosthetics and soft robotics applications. However, robust control, modeling non-linear behavior, and scalable fabrication are considered the most critical challenges for applying the soft robotic systems in real conditions. Researchers from around the world investigate the scientific and engineering foundations of polymer actuators, especially the principles of their work, for the purpose of a better control of their capability and durability. The activation method of actuators and the realization of required mechanical properties are the main restrictions on using actuators in real applications. The latest highlights, operating principles, perspectives, and challenges of electroactive materials (EAPs) such as dielectric EAPs, ferroelectric polymers, electrostrictive graft elastomers, liquid crystal elastomers, ionic gels, and ionic polymer-metal composites are reviewed in this article.
Keywords: artificial muscles; conductive polymers; dielectric EAPs; electroactive polymers (EAPs); electrostrictive graft elastomers; ionic gels; ionic polymer-metal composites; liquid crystal elastomers.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Ozsecen M.Y., Mavroidis C. Electroactive Polymer Actuators and Devices (EAPAD) 2010. Volume 7642. SPIE; Bellingham, WA, USA: 2010. Nonlinear force control of dielectric electroactive polymer actuators; pp. 673–680. - DOI
-
- Qi B., Lu W., Mattes B.R. Smart Structures and Materials 2002: Electroactive Polymer Actuators and Devices (EAPAD) Volume 4695. SPIE; Bellingham, WA, USA: 2002. Control system for conducting polymer actuators; pp. 359–366. - DOI
-
- Anderson I.A., Gisby T.A., McKay T.G., O’Brien B.M., Calius E. Multi-functional dielectric elastomer artificial muscles for soft and smart machines. J. Appl. Phys. 2012;112:041101. doi: 10.1063/1.4740023. - DOI
-
- Bar-Cohen Y. Electroactive Polymers as Artificial Muscles—Reality, Potential and Challenges, Vol. PM136. 2nd ed. SPIE Press; Bellingham, WA, USA: 2004. pp. 1–765.
-
- Bar-Cohen Y. Biomimetics—Biologically Inspired Technologies. 1st ed. CRC Press; Boca Raton, FL, USA: 2005. pp. 1–55.
Publication types
LinkOut - more resources
Full Text Sources
