

Thumb Stabilization and Assistance in a Robotic Hand Orthosis for Post-Stroke Hemiparesis
- PMID: 35832507
- PMCID: PMC9272827
- DOI: 10.1109/lra.2022.3185365
Thumb Stabilization and Assistance in a Robotic Hand Orthosis for Post-Stroke Hemiparesis
Abstract
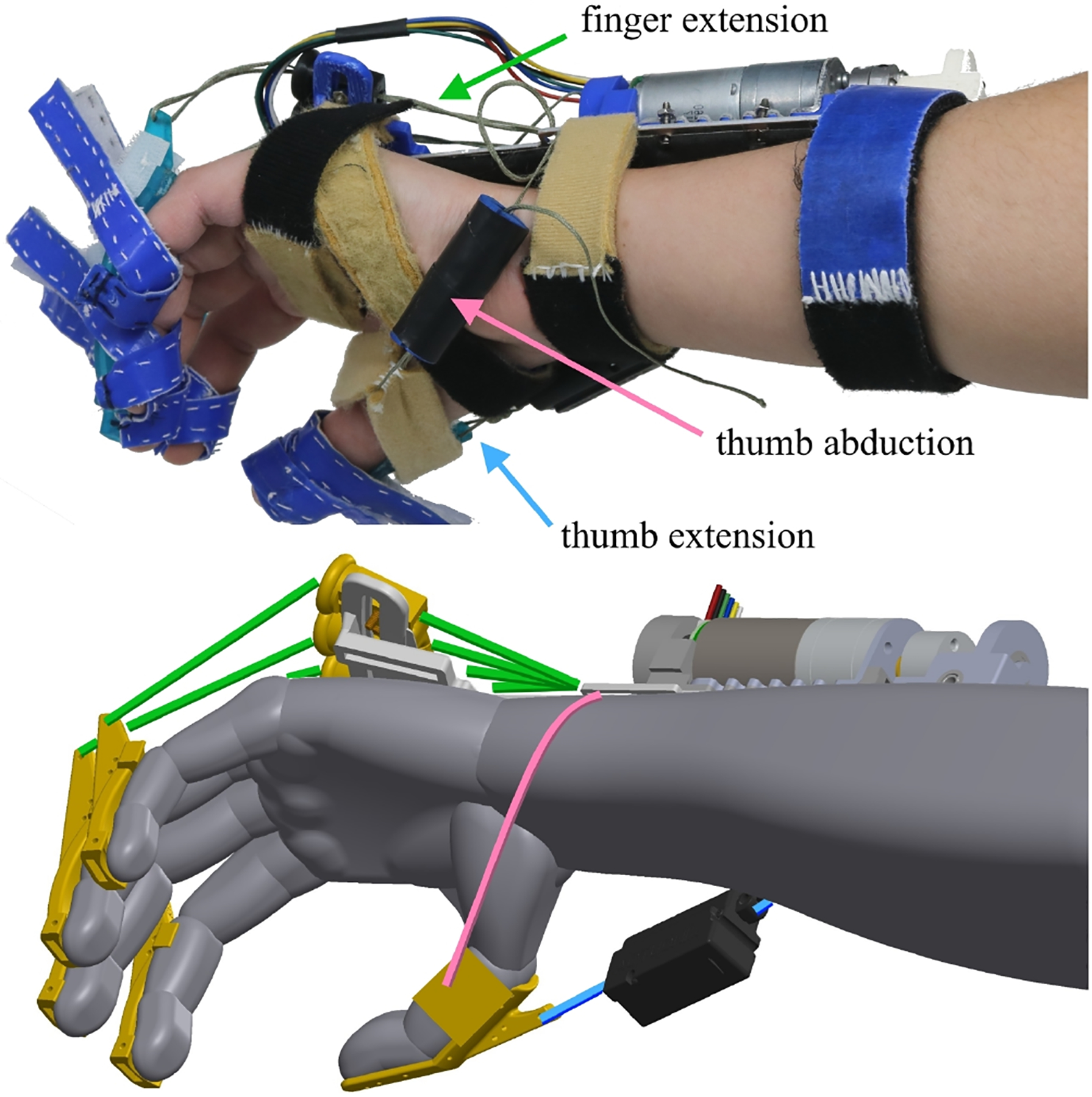
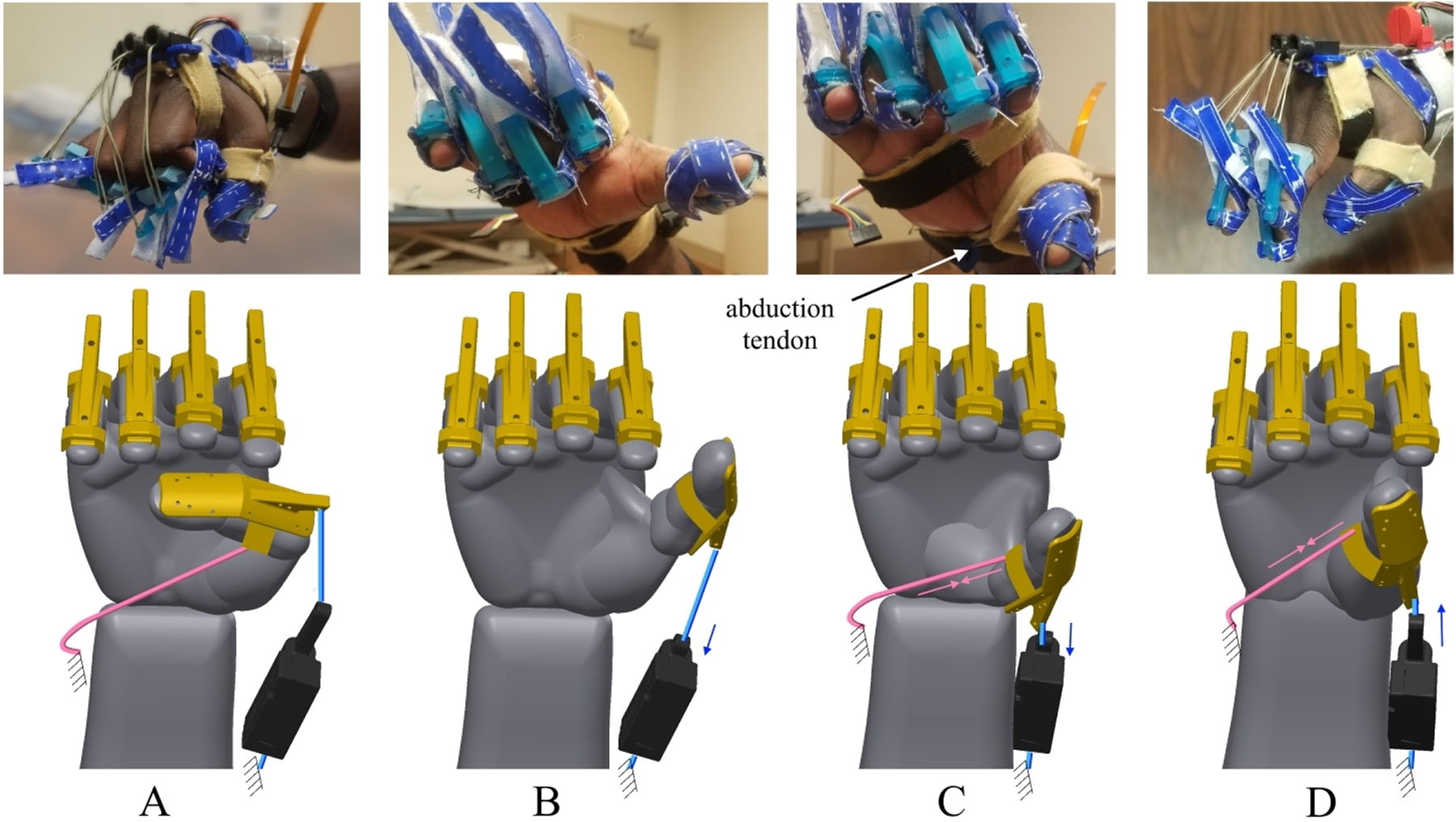
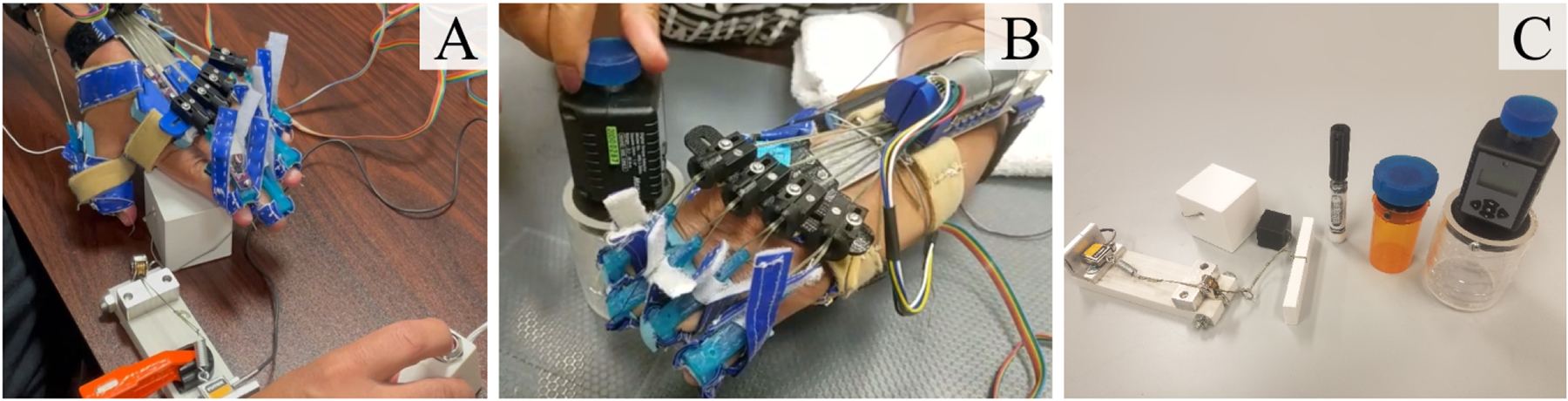
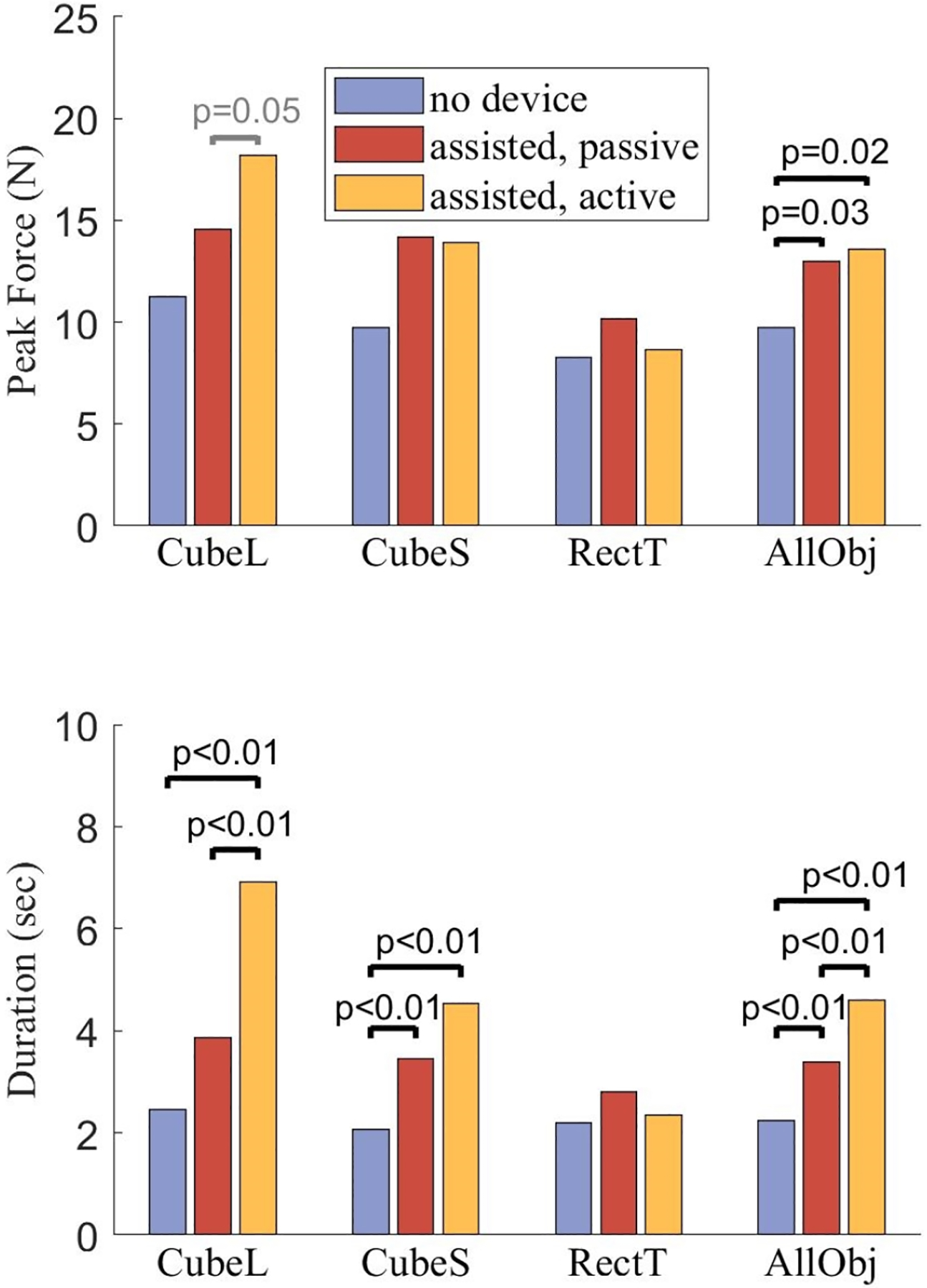
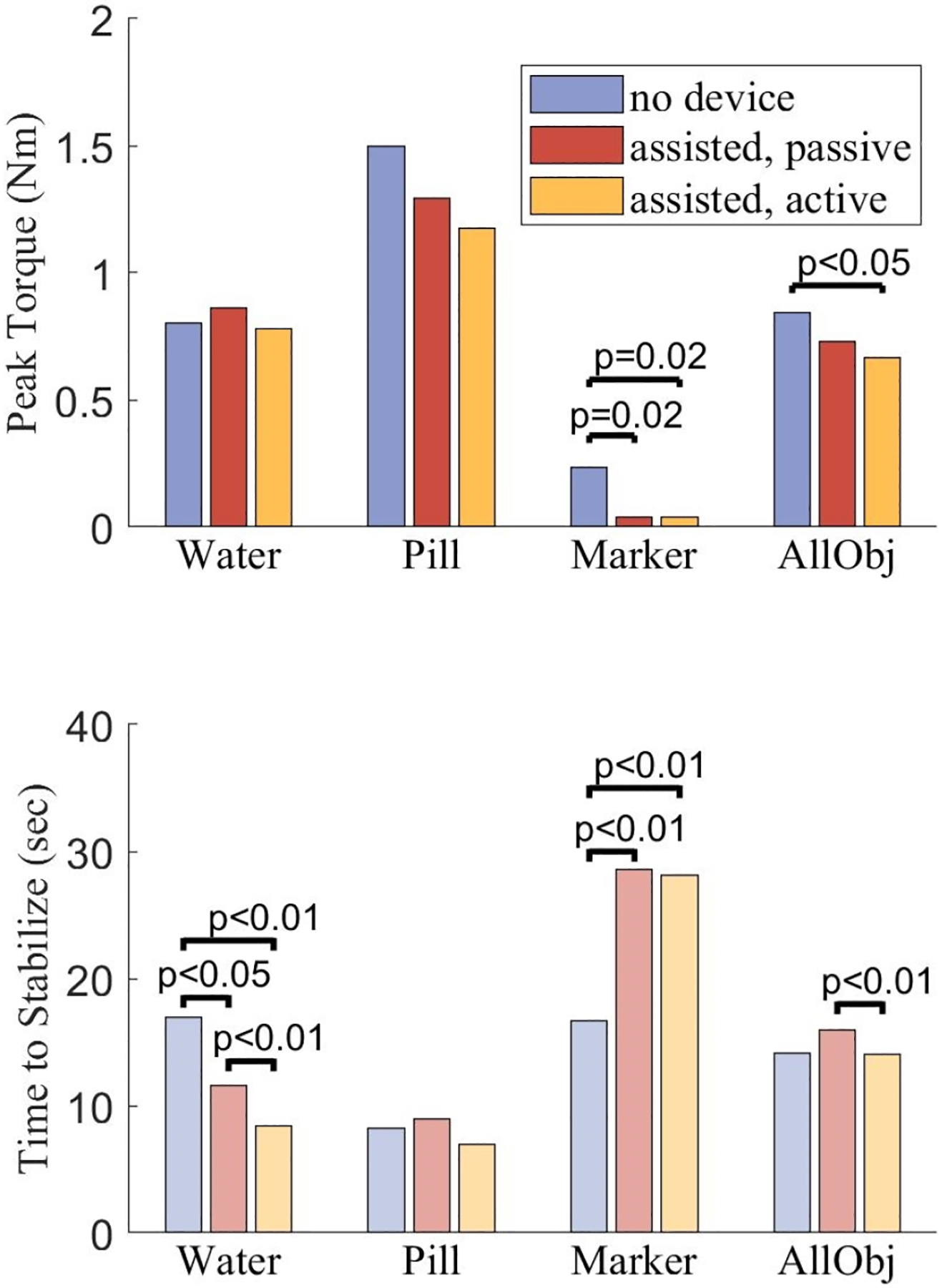
We propose a dual-cable method of stabilizing the thumb in the context of a hand orthosis designed for individuals with upper extremity hemiparesis after stroke. This cable network adds opposition/reposition capabilities to the thumb, and increases the likelihood of forming a hand pose that can successfully manipulate objects. In addition to a passive-thumb version (where both cables are of fixed length), our approach also allows for a single-actuator active-thumb version (where the extension cable is actuated while the abductor remains passive), which allows a range of motion intended to facilitate creating and maintaining grasps. We performed experiments with five chronic stroke survivors consisting of unimanual resistive-pull tasks and bimanual twisting tasks with simulated real-world objects; these explored the effects of thumb assistance on grasp stability and functional range of motion. Our results show that both active- and passive-thumb versions achieved similar performance in terms of improving grasp force generation over a no-device baseline, but active thumb stabilization enabled users to maintain grasps for longer durations.
Keywords: Physically Assistive Devices; Prosthetics and Exoskeletons; Rehabilitation Robotics; Wearable Robotics.
Figures
Similar articles
-
Clinician perceptions of a novel wearable robotic hand orthosis for post-stroke hemiparesis.Disabil Rehabil. 2025 Mar;47(6):1577-1586. doi: 10.1080/09638288.2024.2375056. Epub 2024 Jul 8. Disabil Rehabil. 2025. PMID: 38975689
-
Bioinspired High-Degrees of Freedom Soft Robotic Glove for Restoring Versatile and Comfortable Manipulation.Soft Robot. 2022 Aug;9(4):734-744. doi: 10.1089/soro.2020.0167. Epub 2021 Aug 12. Soft Robot. 2022. PMID: 34388039
-
A pediatric robotic thumb exoskeleton for at-home rehabilitation: the Isolated Orthosis for Thumb Actuation (IOTA).IEEE Int Conf Rehabil Robot. 2013 Jun;2013:6650500. doi: 10.1109/ICORR.2013.6650500. IEEE Int Conf Rehabil Robot. 2013. PMID: 24187315
-
An overview of robotic/mechanical devices for post-stroke thumb rehabilitation.Disabil Rehabil Assist Technol. 2018 Oct;13(7):683-703. doi: 10.1080/17483107.2018.1425746. Epub 2018 Jan 15. Disabil Rehabil Assist Technol. 2018. PMID: 29334274 Review.
-
Robotic assistive and rehabilitation devices leading to motor recovery in upper limb: a systematic review.Disabil Rehabil Assist Technol. 2023 Jul;18(5):658-672. doi: 10.1080/17483107.2021.1906960. Epub 2021 Apr 16. Disabil Rehabil Assist Technol. 2023. PMID: 33861684
Cited by
-
Research trends and hotspots of post-stroke upper limb dysfunction: a bibliometric and visualization analysis.Front Neurol. 2024 Oct 2;15:1449729. doi: 10.3389/fneur.2024.1449729. eCollection 2024. Front Neurol. 2024. PMID: 39416663 Free PMC article.
-
ChatEMG: Synthetic Data Generation to Control a Robotic Hand Orthosis for Stroke.IEEE Robot Autom Lett. 2025 Feb;10(2):907-914. doi: 10.1109/lra.2024.3511372. Epub 2024 Dec 4. IEEE Robot Autom Lett. 2025. PMID: 39711823
-
Clinician perceptions of a novel wearable robotic hand orthosis for post-stroke hemiparesis.Disabil Rehabil. 2025 Mar;47(6):1577-1586. doi: 10.1080/09638288.2024.2375056. Epub 2024 Jul 8. Disabil Rehabil. 2025. PMID: 38975689
-
Volitional Control of the Paretic Hand Post-Stroke Increases Finger Stiffness and Resistance to Robot-Assisted Movement.Proc IEEE RAS EMBS Int Conf Biomed Robot Biomechatron. 2024 Sep;2024:1670-1675. doi: 10.1109/biorob60516.2024.10719809. Epub 2024 Oct 23. Proc IEEE RAS EMBS Int Conf Biomed Robot Biomechatron. 2024. PMID: 39649182 Free PMC article.
-
Meta-Learning for Fast Adaptation in Intent Inferral on a Robotic Hand Orthosis for Stroke.Rep U S. 2024 Oct;2024:4693-4700. doi: 10.1109/iros58592.2024.10801596. Epub 2024 Dec 25. Rep U S. 2024. PMID: 40765626 Free PMC article.
References
-
- Kamper DG, Fischer HC, Cruz EG, and Rymer WZ, “Weakness is the primary contributor to finger impairment in chronic stroke,” Arch. Phys. Med. Rehabil, vol. 87, no. 9, pp. 1262–1269, Sep. 2006. - PubMed
-
- Gasser BW, Martinez A, Sasso-Lance E, Kandilakis C, Durrough CM, and Goldfarb M, “Preliminary Assessment of a Hand and Arm Exoskeleton for Enabling Bimanual Tasks for Individuals With Hemiparesis,” IEEE Trans. Neural Syst. Rehabil. Eng, vol. 28, no. 10, pp. 2214–2223, Oct. 2020. - PubMed
-
- Lee HC, Kuo FL, Lin YN, Liou TH, Lin JC, and Huang SW, “Effects of Robot-Assisted Rehabilitation on Hand Function of People With Stroke: A Randomized, Crossover-Controlled, Assessor-Blinded Study,” Am. J. Occup. Ther, vol. 75, no. 1, pp. 7501205020p1–7501205020p11, Jan. 2021. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous