

User Profiling to Enhance Clinical Assessment and Human-Robot Interaction: A Feasibility Study
- PMID: 35846164
- PMCID: PMC9266091
- DOI: 10.1007/s12369-022-00901-1
User Profiling to Enhance Clinical Assessment and Human-Robot Interaction: A Feasibility Study
Abstract
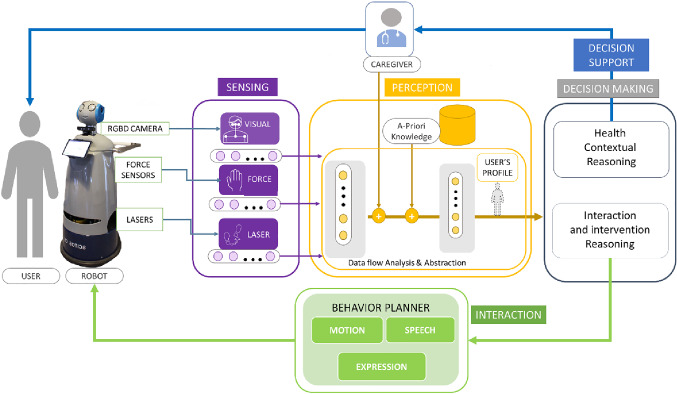
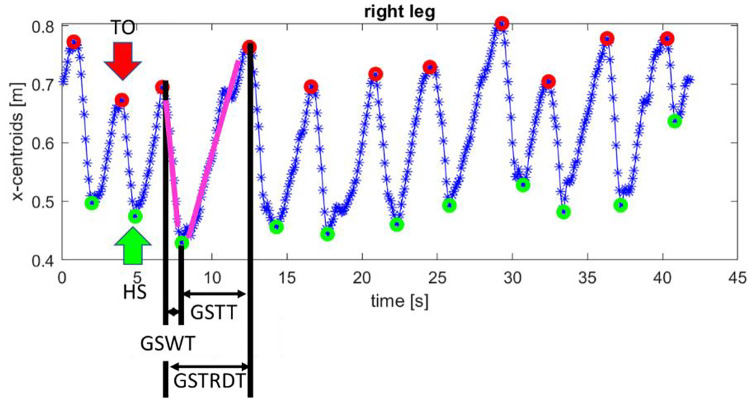
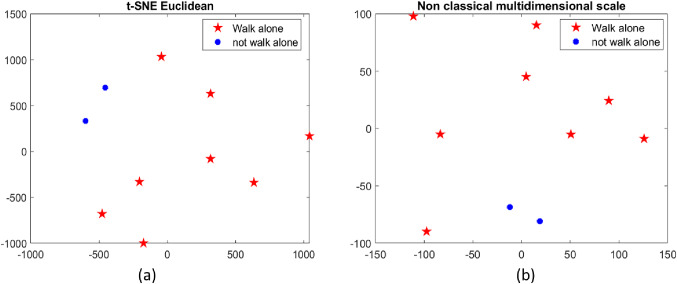
Socially Assistive Robots (SARs) are designed to support us in our daily life as a companion, and assistance but also to support the caregivers' work. SARs should show personalized and human-like behavior to improve their acceptance and, consequently, their use. Additionally, they should be trustworthy by caregivers and professionals to be used as support for their work (e.g. objective assessment, decision support tools). In this context the aim of the paper is dual. Firstly, this paper aims to present and discuss the robot behavioral model based on sensing, perception, decision support, and interaction modules. The novel idea behind the proposed model is to extract and use the same multimodal features set for two purposes: (i) to profile the user, so to be used by the caregiver as a decision support tool for the assessment and monitoring of the patient; (ii) to fine-tune the human-robot interaction if they can be correlated to the social cues. Secondly, this paper aims to test in a real environment the proposed model using a SAR robot, namely ASTRO. Particularly, it measures the body posture, the gait cycle, and the handgrip strength during the walking support task. Those collected data were analyzed to assess the clinical profile and to fine-tune the physical interaction. Ten older people (65.2 ± 15.6 years) were enrolled for this study and were asked to walk with ASTRO at their normal speed for 10 m. The obtained results underline a good estimation (p < 0.05) of gait parameters, handgrip strength, and angular excursion of the torso with respect to most used instruments. Additionally, the sensory outputs were combined in the perceptual model to profile the user using non-classical and unsupervised techniques for dimensionality reduction namely T-distributed Stochastic Neighbor Embedding (t-SNE) and non-classic multidimensional scaling (nMDS). Indeed, these methods can group the participants according to their residual walking abilities.
Keywords: Multimodal sensors; Robot behavioral model; Social assistive robot; User profiling.
© The Author(s) 2022.
Conflict of interest statement
Conflict of interestThe authors declare that they have no conflict of interest.
Figures

References
-
- Clabaugh C, Matarić M (2018) Robots for the people, by the people: personalizing human-machine interaction. Sci Robot 3:eaat7451. 10.1126/scirobotics.aat7451 - PubMed
-
- Rossi S, Ferland F, Tapus A. User profiling and behavioral adaptation for HRI: a survey. Pattern Recogn Lett. 2017;99:3–12. doi: 10.1016/j.patrec.2017.06.002. - DOI
-
- Shishehgar M, Kerr D, Blake J (2018) A systematic review of research into how robotic technology can help older people. Smart Health 7–8
LinkOut - more resources
Full Text Sources
Miscellaneous