

Protocol to Study Spatial Subgoal Learning Using Escape Behavior in Mice
- PMID: 35864903
- PMCID: PMC9257842
- DOI: 10.21769/BioProtoc.4443
Protocol to Study Spatial Subgoal Learning Using Escape Behavior in Mice
Abstract
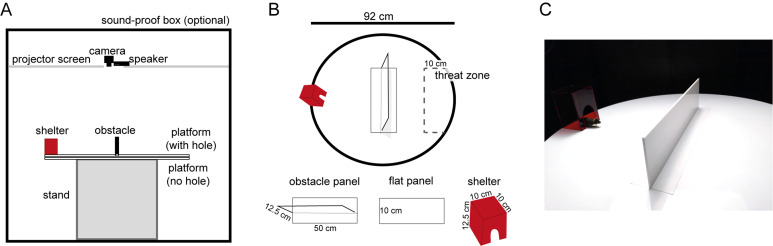
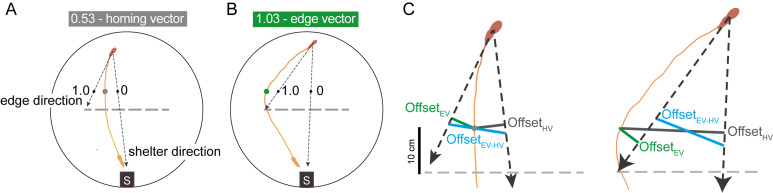
Rodent spatial navigation is a key model system for studying mammalian cognition and its neural mechanisms. Of particular interest is how animals memorize the structure of their environments and compute multi-step routes to a goal. Previous work on multi-step spatial reasoning has generally involved placing rodents at the start of a maze until they learn to navigate to a reward without making wrong turns. It thus remains poorly understood how animals rapidly learn about the structure of naturalistic open environments with goals and obstacles. Here we present an assay in which mice spontaneously memorize two-step routes in an environment with a shelter and an obstacle. We allow the mice to explore this environment for 20 min, and then we remove the obstacle. We then present auditory threat stimuli, causing the mouse to escape to the shelter. Finally, we record each escape route and measure whether it targets the shelter directly (a 'homing-vector' escape) or instead targets the location where the obstacle edge was formerly located (an 'edge-vector' escape). Since the obstacle is no longer there, these obstacle-edge-directed escape routes provide evidence that the mouse has memorized a subgoal location, i.e., a waypoint targeted in order to efficiently get to the shelter in the presence of an obstacle. By taking advantage of instinctive escape responses, this assay probes a multi-step spatial memory that is learned in a single session without pretraining. The subgoal learning phenomenon it generates can be useful not only for researchers working on navigation and instinctive behavior, but also for neuroscientists studying the neural basis of multi-step spatial reasoning.
Keywords: Behavior; Defensive behavior; Escape; Mouse; Navigation; Neuroscience; Spatial memory; Subgoals.
Copyright © 2022 The Authors; exclusive licensee Bio-protocol LLC.
Conflict of interest statement
Competing interestsThe authors declare that there are no any conflicting and/or competing interests.
Figures
References
-
- Barnes C. A.(1979). Memory deficits associated with senescence: a neurophysiological and behavioral study in the rat. J Comp Physiol Psychol 93(1): 74-104. - PubMed
-
- Ellard C. G. and Eller M. C.(2009). Spatial cognition in the gerbil: computing optimal escape routes from visual threats. Anim Cogn 12(2): 333-345. - PubMed
-
- Mathis A., Mamidanna P., Cury K. M., Abe T., Murthy V. N., Mathis M. W. and Bethge M.(2018). DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nat Neurosci 21(9): 1281-1289. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
