

Developing Intelligent Robots that Grasp Affordance
- PMID: 35865329
- PMCID: PMC9294137
- DOI: 10.3389/frobt.2022.951293
Developing Intelligent Robots that Grasp Affordance
Abstract
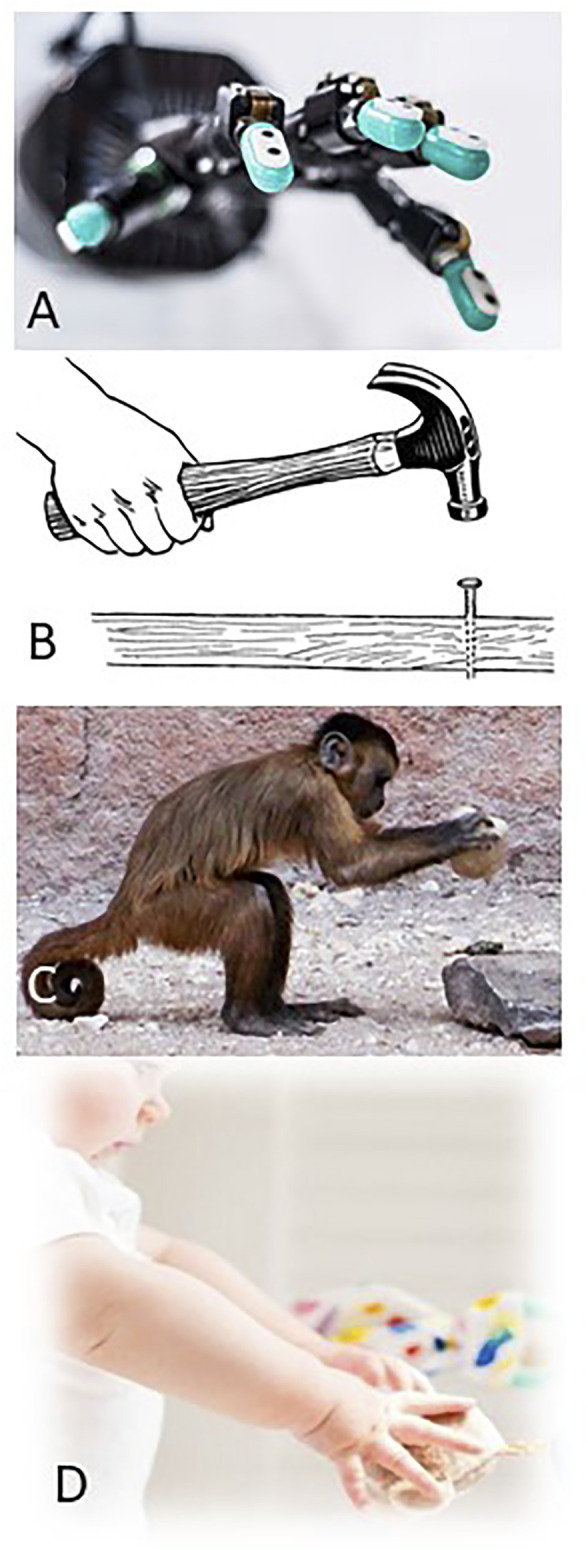
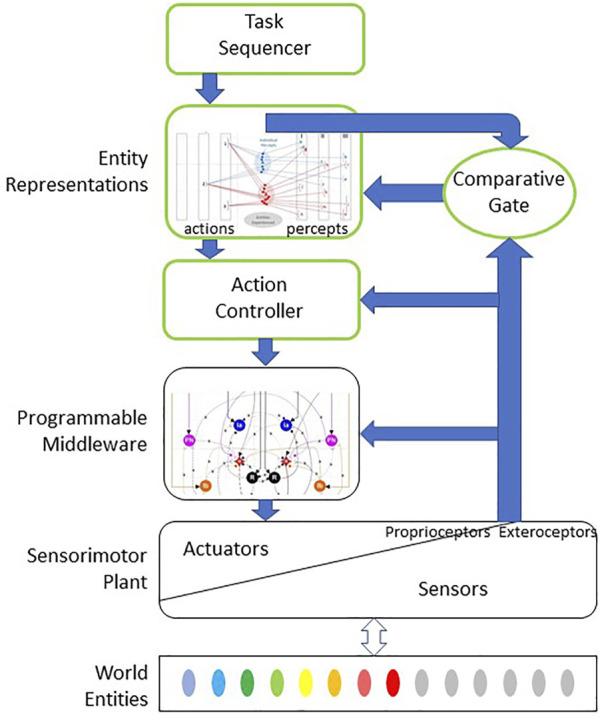
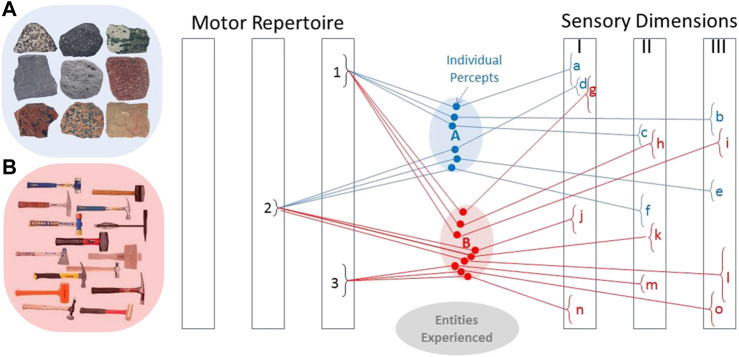
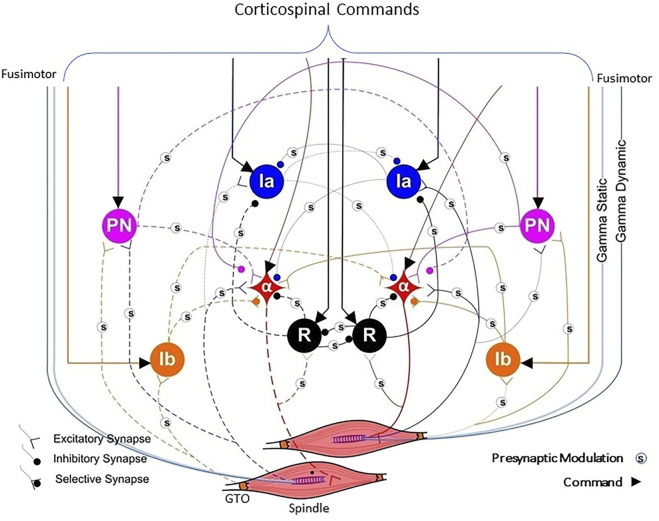
Humans and robots operating in unstructured environments both need to classify objects through haptic exploration and use them in various tasks, but currently they differ greatly in their strategies for acquiring such capabilities. This review explores nascent technologies that promise more convergence. A novel form of artificial intelligence classifies objects according to sensory percepts during active exploration and decides on efficient sequences of exploratory actions to identify objects. Representing objects according to the collective experience of manipulating them provides a substrate for discovering causality and affordances. Such concepts that generalize beyond explicit training experiences are an important aspect of human intelligence that has eluded robots. For robots to acquire such knowledge, they will need an extended period of active exploration and manipulation similar to that employed by infants. The efficacy, efficiency and safety of such behaviors depends on achieving smooth transitions between movements that change quickly from exploratory to executive to reflexive. Animals achieve such smoothness by using a hierarchical control scheme that is fundamentally different from those of conventional robotics. The lowest level of that hierarchy, the spinal cord, starts to self-organize during spontaneous movements in the fetus. This allows its connectivity to reflect the mechanics of the musculoskeletal plant, a bio-inspired process that could be used to adapt spinal-like middleware for robots. Implementation of these extended and essential stages of fetal and infant development is impractical, however, for mechatronic hardware that does not heal and replace itself like biological tissues. Instead such development can now be accomplished in silico and then cloned into physical robots, a strategy that could transcend human performance.
Keywords: dexterity; exploration; haptics; learning; manipulation; reflexes.
Copyright © 2022 Loeb.
Conflict of interest statement
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures

References
-
- Baldwin J. M. (1896). A New Factor in Evolution. Am. Nat. 30 (354), 441–451. 10.1086/276408 - DOI
Publication types
LinkOut - more resources
Full Text Sources