

Classification Predictive Model for Air Leak Detection in Endoworm Enteroscopy System
- PMID: 35890890
- PMCID: PMC9318585
- DOI: 10.3390/s22145211
Classification Predictive Model for Air Leak Detection in Endoworm Enteroscopy System
Abstract
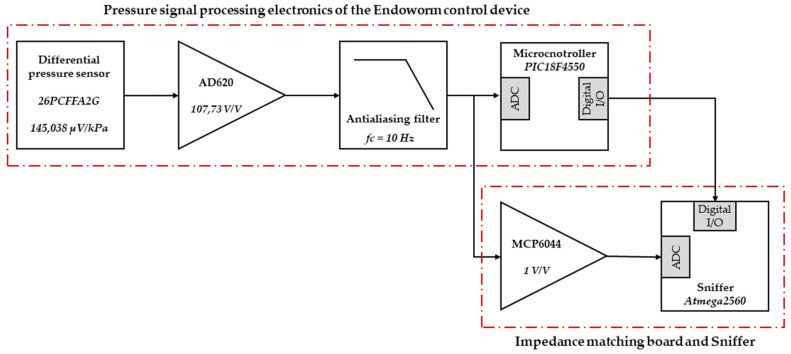
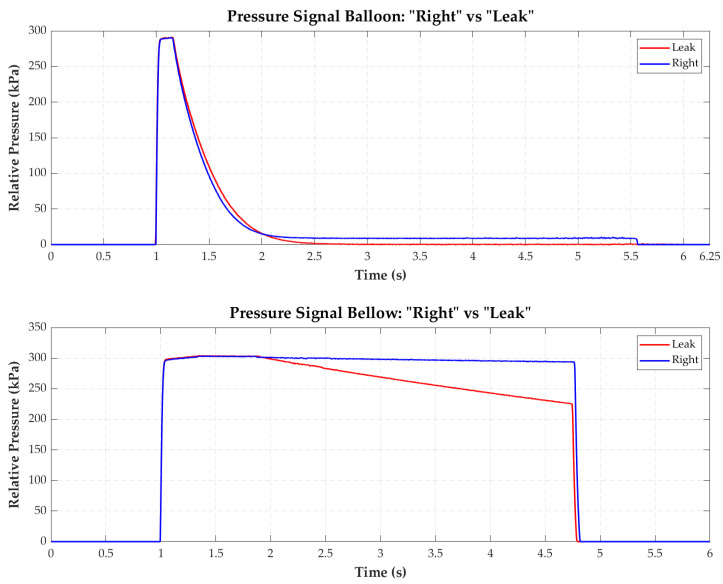
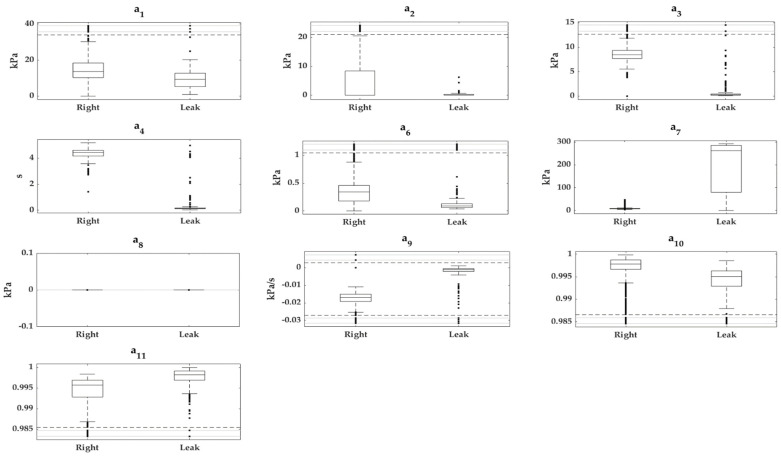
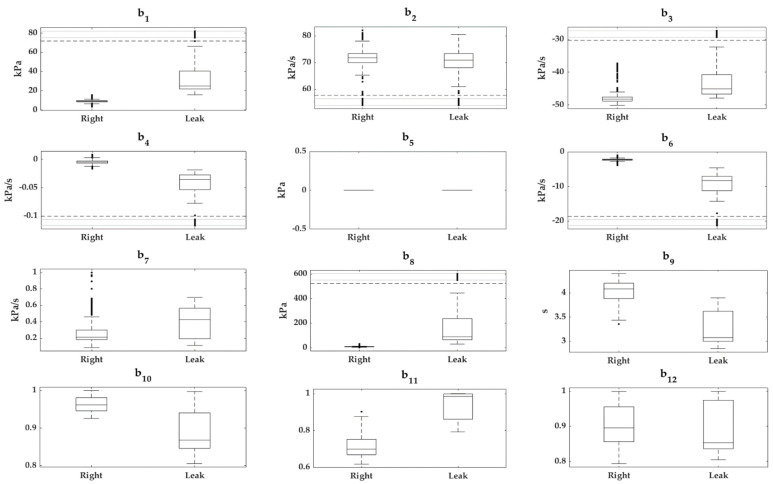
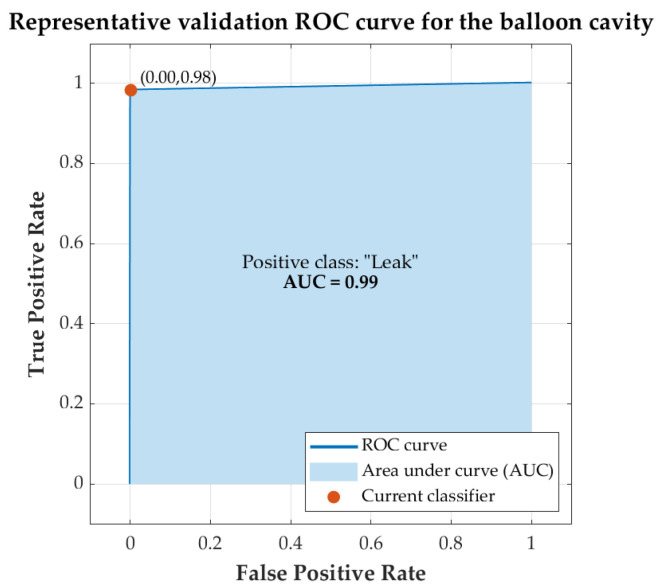
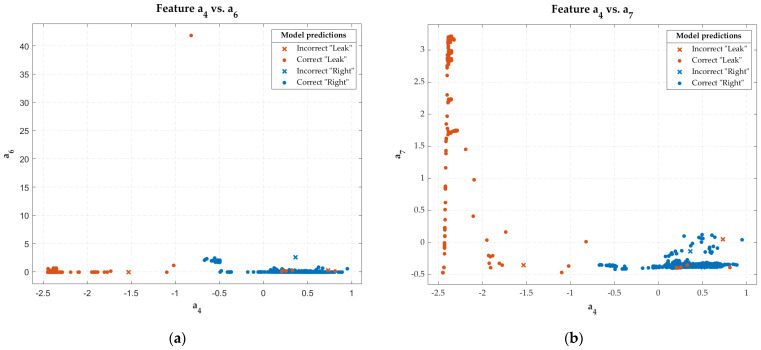
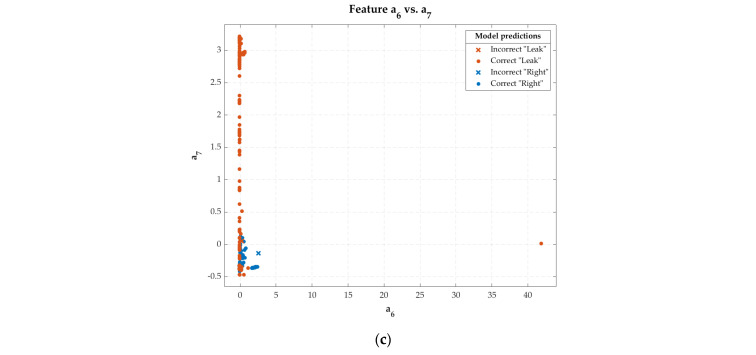
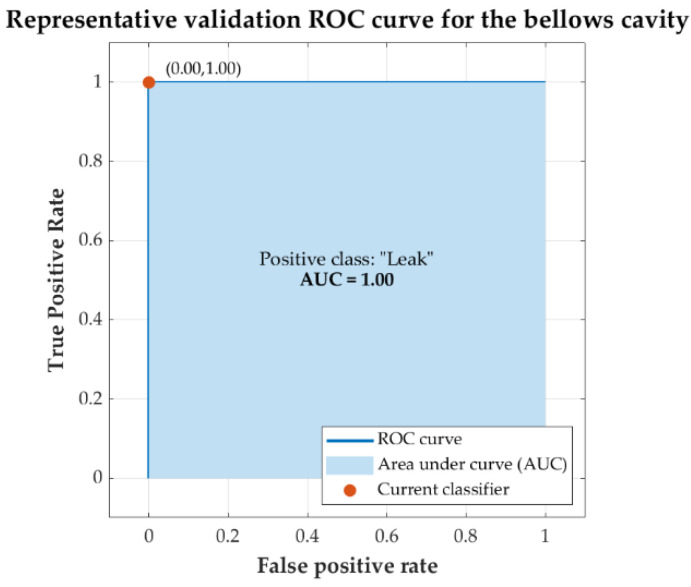
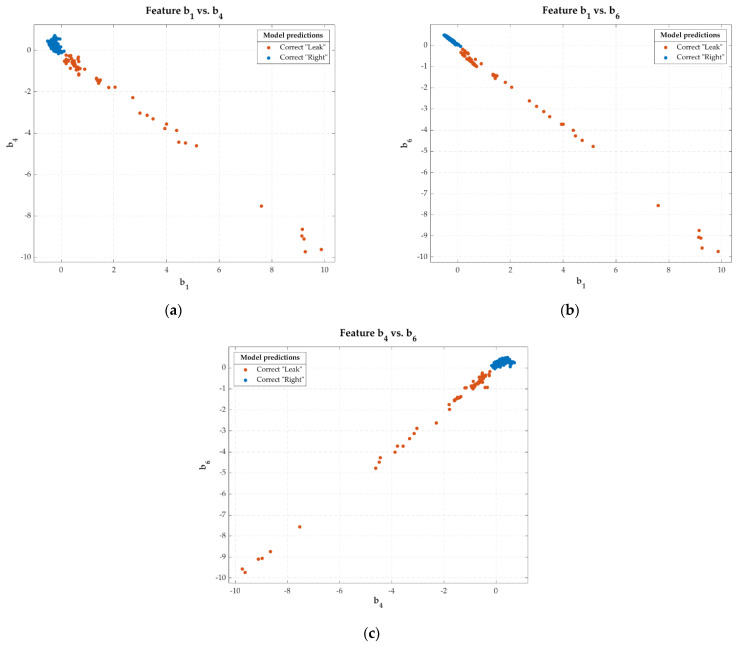
Current enteroscopy techniques present complications that are intended to be improved with the development of a new semi-automatic device called Endoworm. It consists of two different types of inflatable cavities. For its correct operation, it is essential to detect in real time if the inflatable cavities are malfunctioning (presence of air leakage). Two classification predictive models were obtained, one for each cavity typology, which must discern between the "Right" or "Leak" states. The cavity pressure signals were digitally processed, from which a set of features were extracted and selected. The predictive models were obtained from the features, and a prior classification of the signals between the two possible states was used as input to different supervised machine learning algorithms. The accuracy obtained from the classification predictive model for cavities of the balloon-type was 99.62%, while that of the bellows-type was 100%, representing an encouraging result. Once the models are validated with data generated in animal model tests and subsequently in exploratory clinical tests, their incorporation in the software device will ensure patient safety during small bowel exploration.
Keywords: classification predictive models; digital signal processing; enteroscopy; feature extraction; inflatable cavities; medical device; real-time detection system; soft robot.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Tsujikawa T., Saitoh Y., Andoh A., Imaeda H., Hata K., Minematsu H., Senoh K., Hayafuji K., Ogawa A., Nakahara T., et al. Clinical impact of novel single balloon enteroscopy. J. Gastroenterol. Hepatol. 2007;22:A226. - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
