

Biomechanical Analysis of Stoop and Free-Style Squat Lifting and Lowering with a Generic Back-Support Exoskeleton Model
- PMID: 35897411
- PMCID: PMC9332239
- DOI: 10.3390/ijerph19159040
Biomechanical Analysis of Stoop and Free-Style Squat Lifting and Lowering with a Generic Back-Support Exoskeleton Model
Abstract
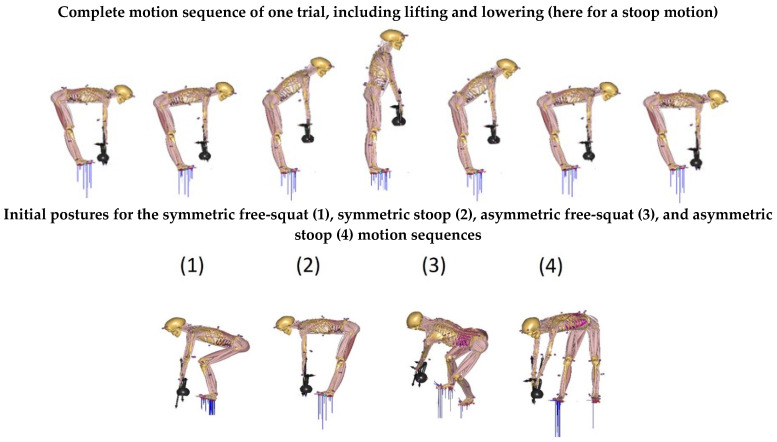
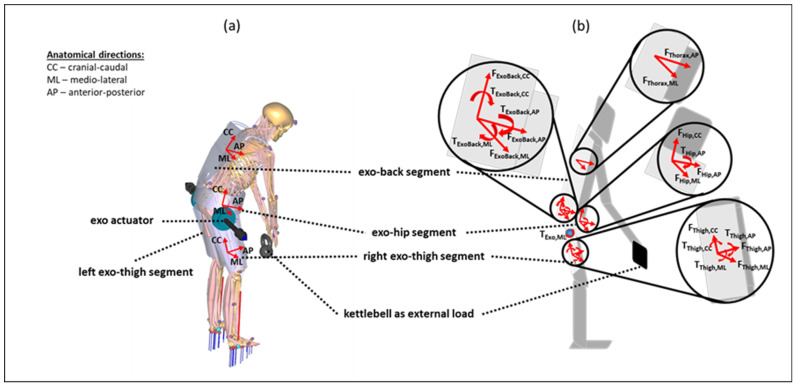
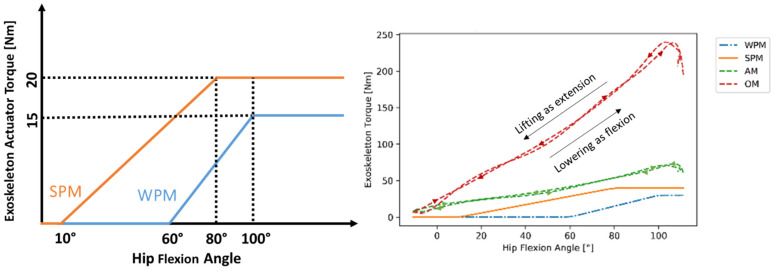
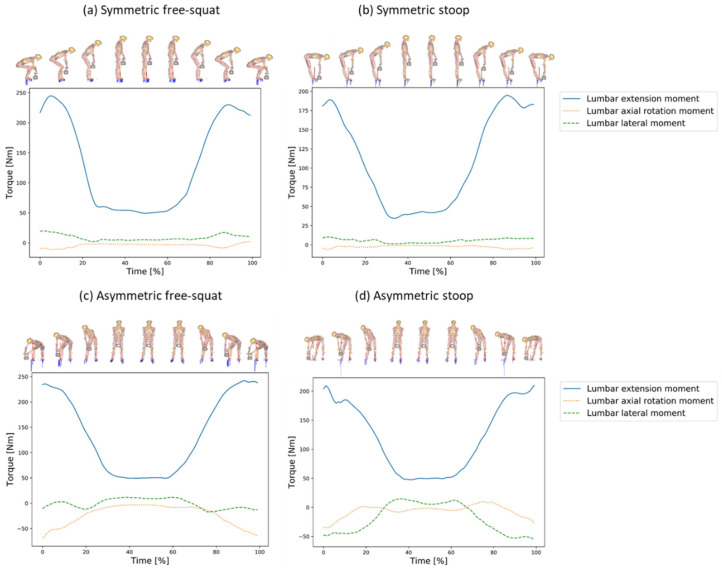
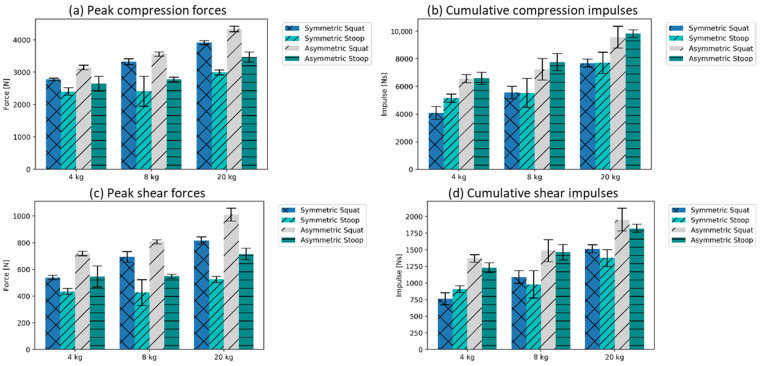
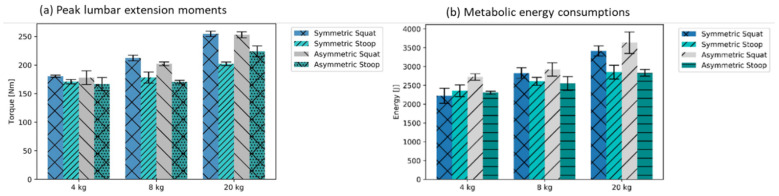
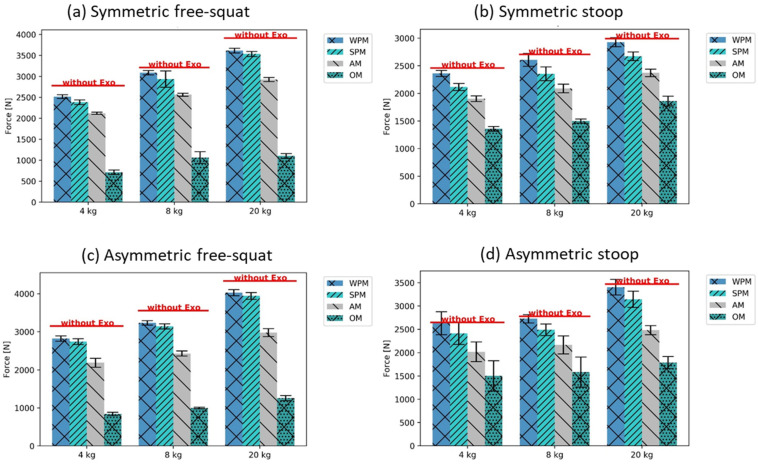
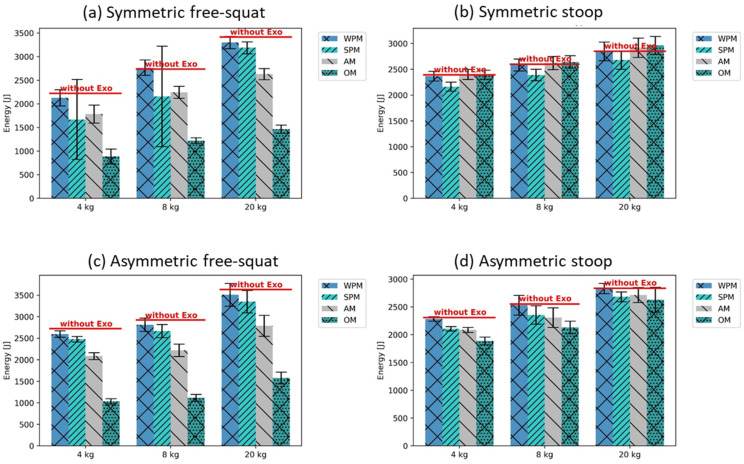
Musculoskeletal disorders (MSDs) induced by industrial manual handling tasks are a major issue for workers and companies. As flexible ergonomic solutions, occupational exoskeletons can decrease critically high body stress in situations of awkward postures and motions. Biomechanical models with detailed anthropometrics and motions help us to acquire a comprehension of person- and application-specifics by considering the intended and unintended effects, which is crucial for effective implementation. In the present model-based analysis, a generic back-support exoskeleton model was introduced and applied to the motion data of one male subject performing symmetric and asymmetric dynamic manual handling tasks. Different support modes were implemented with this model, including support profiles typical of passive and active systems and an unconstrained optimal support mode used for reference to compare and quantify their biomechanical effects. The conducted simulations indicate that there is a high potential to decrease the peak compression forces in L4/L5 during the investigated heavy loaded tasks for all motion sequences and exoskeleton support modes (mean reduction of 16.0% without the optimal support mode). In particular, asymmetric motions (mean reduction of 11.9%) can be relieved more than symmetric ones (mean reduction of 8.9%) by the exoskeleton support modes without the optimal assistance. The analysis of metabolic energy consumption indicates a high dependency on lifting techniques for the effectiveness of the exoskeleton support. While the exoskeleton support substantially reduces the metabolic cost for the free-squat motions, a slightly higher energy consumption was found for the symmetric stoop motion technique with the active and optimal support mode.
Keywords: biomechanics; ergonomics; manual handling; musculoskeletal modeling; occupational exoskeletons.
Conflict of interest statement
There is no conflict of interest.
Figures

References
-
- De Kok J., Vroonhof P., Snjiders J., Roullis G., Clarke M., Peereboom K., van Dorst P., Isusi I. Work-Related Musculoskeletal Disorders: Prevalence, Costs and Demographics in the EU. European Agency for Safety and Health at Work; Luxembourg: 2019. European Risk Observatory Report.
-
- Luttmann A., Jäger M., Griefahn B., Caffier G., Liebers F. Preventing Musculoskeletal Disorders in the Workplace. World Health Organization; Geneva, Switzerland: 2003.
-
- Monica L., Sara Anastasi S., Francesco Draicchio F. Occupational Exoskeletons: Wearable Robotic Devices to Prevent Work-Related Musculoskeletal Disorders in the Workplace of the Future. European Agency for Safety and Health at Work; Luxembourg: 2020.
-
- Theurel J., Desbrosses K. Occupational Exoskeletons: Overview of Their Benefits and Limitations in Preventing Work-Related Musculoskeletal Disorders. IISE Trans. Occup. Ergon. Hum. Factors. 2019;7:264–280. doi: 10.1080/24725838.2019.1638331. - DOI
-
- Agrawal A., Dube A.N., Kansara D., Shah S., Sheth S. Exoskeleton: The Friend of Mankind in context of Rehabilitation and Enhancement. Indian J. Sci. Technol. 2016;9:1–8. doi: 10.17485/ijst/2016/v9iS1/100889. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Research Materials
