

Machine learning for microfluidic design and control
- PMID: 35904162
- PMCID: PMC9361804
- DOI: 10.1039/d2lc00254j
Machine learning for microfluidic design and control
Abstract
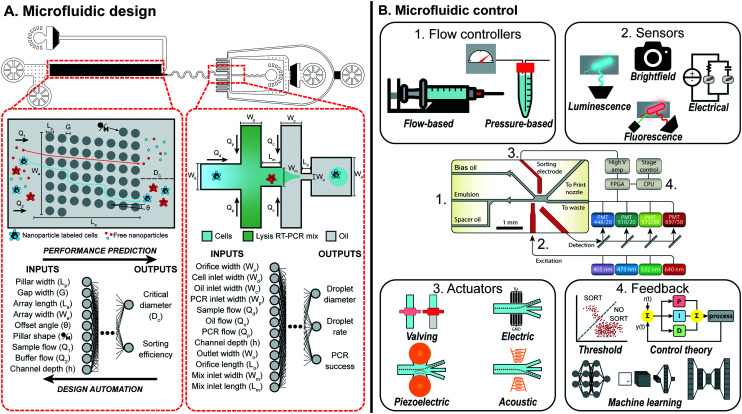
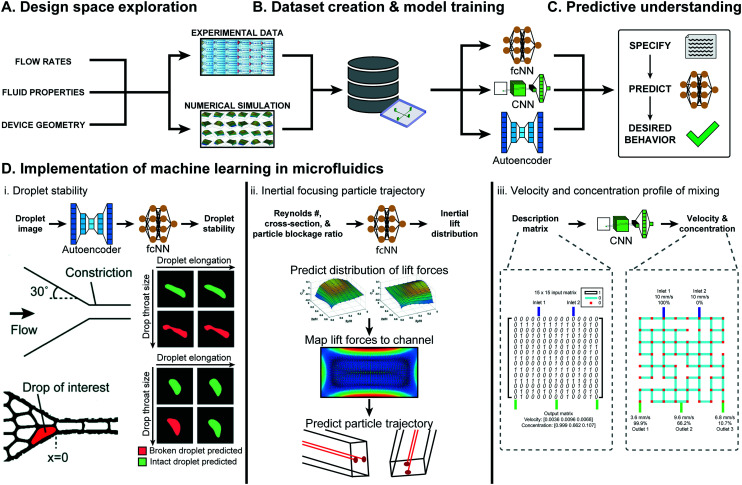
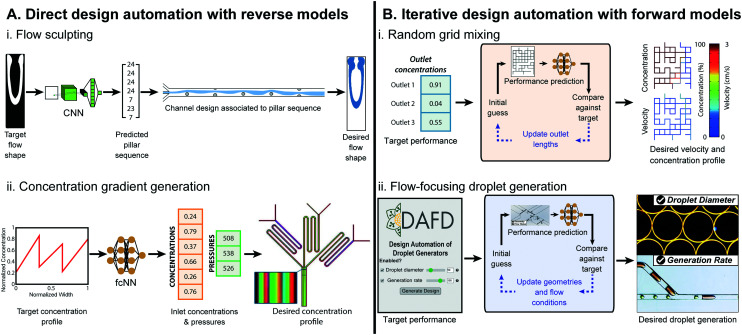
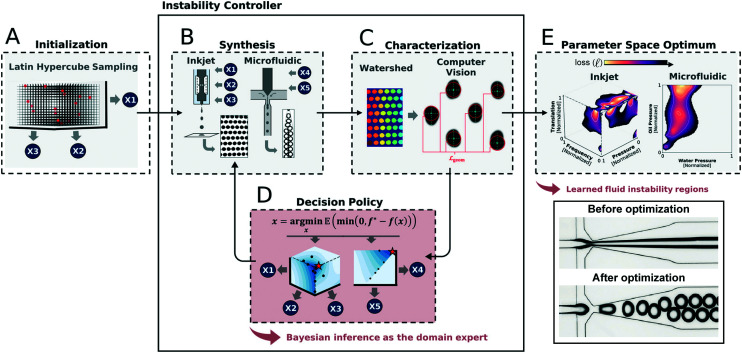
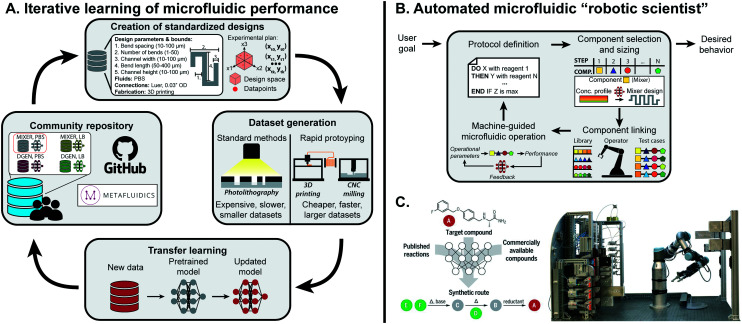
Microfluidics has developed into a mature field with applications across science and engineering, having particular commercial success in molecular diagnostics, next-generation sequencing, and bench-top analysis. Despite its ubiquity, the complexity of designing and controlling custom microfluidic devices present major barriers to adoption, requiring intuitive knowledge gained from years of experience. If these barriers were overcome, microfluidics could miniaturize biological and chemical research for non-experts through fully-automated platform development and operation. The intuition of microfluidic experts can be captured through machine learning, where complex statistical models are trained for pattern recognition and subsequently used for event prediction. Integration of machine learning with microfluidics could significantly expand its adoption and impact. Here, we present the current state of machine learning for the design and control of microfluidic devices, its possible applications, and current limitations.
Conflict of interest statement
There are no conflicts to declare.
Figures
References
-
- Chiu D. T. Demello A. J. Di Carlo D. Doyle P. S. Hansen C. Maceiczyk R. M. Wootton R. C. Chem. 2017;2:201–223.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources