

Lessons for Robotics From the Control Architecture of the Octopus
- PMID: 35923303
- PMCID: PMC9339708
- DOI: 10.3389/frobt.2022.862391
Lessons for Robotics From the Control Architecture of the Octopus
Abstract
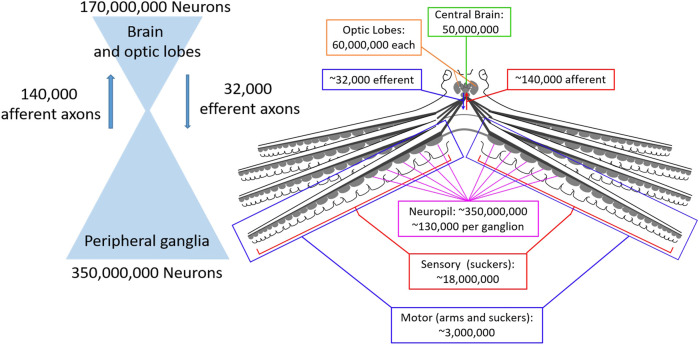
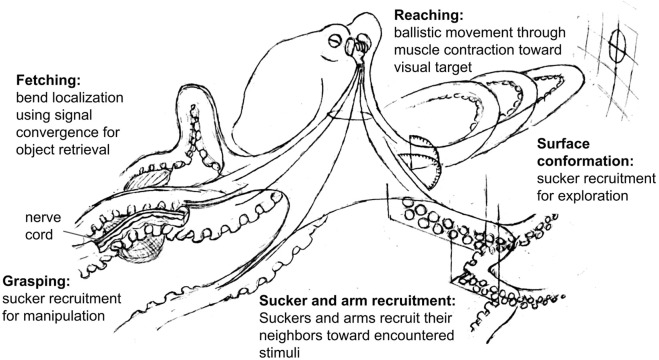
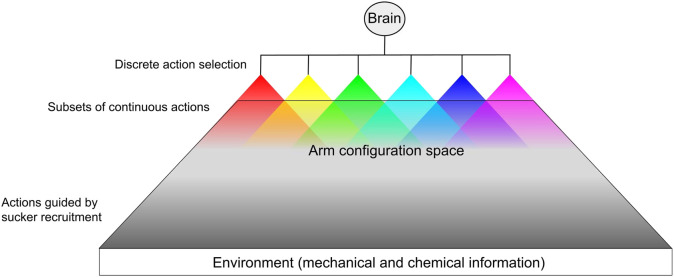
Biological and artificial agents are faced with many of the same computational and mechanical problems, thus strategies evolved in the biological realm can serve as inspiration for robotic development. The octopus in particular represents an attractive model for biologically-inspired robotic design, as has been recognized for the emerging field of soft robotics. Conventional global planning-based approaches to controlling the large number of degrees of freedom in an octopus arm would be computationally intractable. Instead, the octopus appears to exploit a distributed control architecture that enables effective and computationally efficient arm control. Here we will describe the neuroanatomical organization of the octopus peripheral nervous system and discuss how this distributed neural network is specialized for effectively mediating decisions made by the central brain and the continuous actuation of limbs possessing an extremely large number of degrees of freedom. We propose top-down and bottom-up control strategies that we hypothesize the octopus employs in the control of its soft body. We suggest that these strategies can serve as useful elements in the design and development of soft-bodied robotics.
Keywords: biomimetics; neural control architecture; octopus; robotic control; soft robotics.
Copyright © 2022 Sivitilli, Smith and Gire.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures
Similar articles
-
Embodied mechanisms of motor control in the octopus.Curr Biol. 2023 Oct 23;33(20):R1119-R1125. doi: 10.1016/j.cub.2023.09.008. Curr Biol. 2023. PMID: 37875094
-
A soft body as a reservoir: case studies in a dynamic model of octopus-inspired soft robotic arm.Front Comput Neurosci. 2013 Jul 9;7:91. doi: 10.3389/fncom.2013.00091. eCollection 2013. Front Comput Neurosci. 2013. PMID: 23847526 Free PMC article.
-
Mechanisms of octopus arm search behavior without visual feedback.Bioinspir Biomim. 2023 Oct 30;18(6). doi: 10.1088/1748-3190/ad0013. Bioinspir Biomim. 2023. PMID: 37793413
-
Biomechanics, motor control and dynamic models of the soft limbs of the octopus and other cephalopods.J Exp Biol. 2023 Apr 25;226(Suppl_1):jeb245295. doi: 10.1242/jeb.245295. Epub 2023 Apr 21. J Exp Biol. 2023. PMID: 37083140 Review.
-
Classification and Evaluation of Octopus-Inspired Suction Cups for Soft Continuum Robots.Adv Sci (Weinh). 2024 Aug;11(30):e2400806. doi: 10.1002/advs.202400806. Epub 2024 Jun 14. Adv Sci (Weinh). 2024. PMID: 38874316 Free PMC article. Review.
Cited by
-
In vivo electrophysiology recordings and computational modeling can predict octopus arm movement.Bioelectron Med. 2025 Feb 14;11(1):4. doi: 10.1186/s42234-025-00166-9. Bioelectron Med. 2025. PMID: 39948616 Free PMC article.
-
Neuronal segmentation in cephalopod arms.bioRxiv [Preprint]. 2024 Jun 1:2024.05.29.596333. doi: 10.1101/2024.05.29.596333. bioRxiv. 2024. Update in: Nat Commun. 2025 Jan 15;16(1):443. doi: 10.1038/s41467-024-55475-5. PMID: 38853825 Free PMC article. Updated. Preprint.
-
Molecular and morphological circuitry of the octopus sucker ganglion.bioRxiv [Preprint]. 2025 Feb 11:2025.02.10.637560. doi: 10.1101/2025.02.10.637560. bioRxiv. 2025. Update in: J Comp Neurol. 2025 May;533(5):e70055. doi: 10.1002/cne.70055. PMID: 39990388 Free PMC article. Updated. Preprint.
-
Molecular and Morphological Circuitry of the Octopus Sucker Ganglion.J Comp Neurol. 2025 May;533(5):e70055. doi: 10.1002/cne.70055. J Comp Neurol. 2025. PMID: 40293445 Free PMC article.
-
Mechanosensory Control of Locomotion in Animals and Robots: Moving Forward.Integr Comp Biol. 2023 Aug 23;63(2):450-463. doi: 10.1093/icb/icad057. Integr Comp Biol. 2023. PMID: 37279901 Free PMC article. Review.
References
-
- Agre P. E., Chapman D. (1987). “AAAI’87,” in Proceedings of the sixth National conference on Artificial intelligence - Volume 1, Seattle, Washington, July 13-17, 1987 (AAAI Press; ), 268–272.
-
- Altman J. (1968). University College London. thesis: University of London.
-
- Amos B., Rodriguez I. D. J., Sacks J., Boots B., Kolter J. Z., Differentiable MPC for End-To-End Planning and Control. arXiv:1810.13400 [cs, Math, Stat] (2019), Accessed on 14 Oct, 2019 (available at http://arxiv.org/abs/1810.13400).
-
- Barto A. G., Mahadevan S. (2003). Recent Advances in Hierarchical Reinforcement Learning. Discrete Event Dyn. Syst. 13, 341–379. 10.1023/a:1025696116075 - DOI
LinkOut - more resources
Full Text Sources