

Gecko-Inspired Slant Hierarchical Microstructure-Based Ultrasensitive Iontronic Pressure Sensor for Intelligent Interaction
- PMID: 35935142
- PMCID: PMC9275085
- DOI: 10.34133/2022/9852138
Gecko-Inspired Slant Hierarchical Microstructure-Based Ultrasensitive Iontronic Pressure Sensor for Intelligent Interaction
Abstract
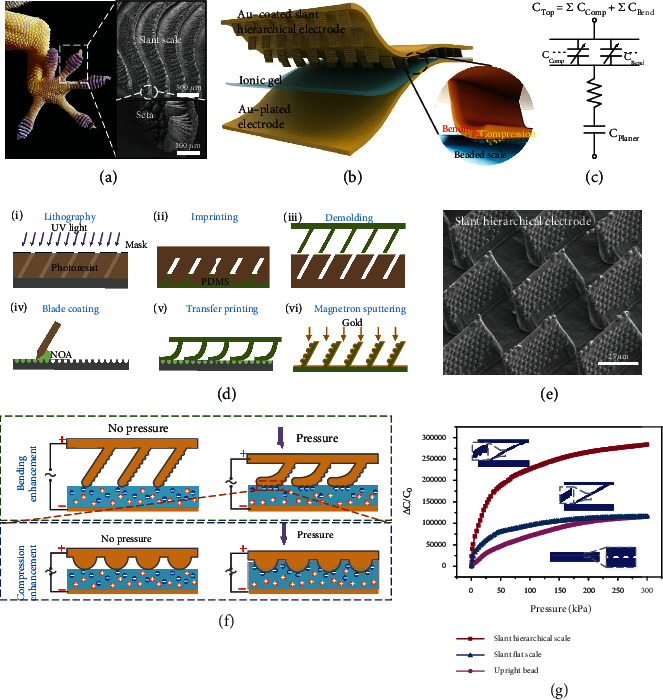
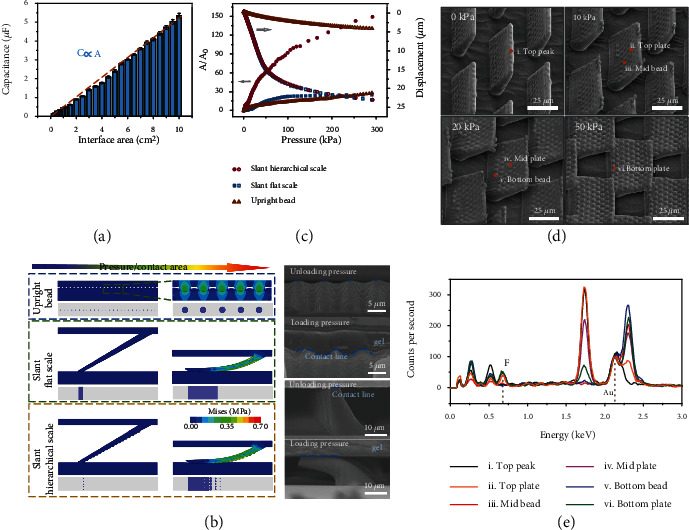
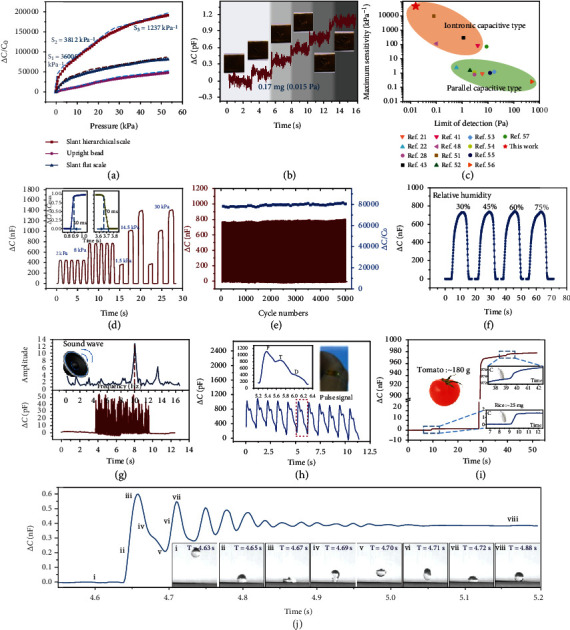
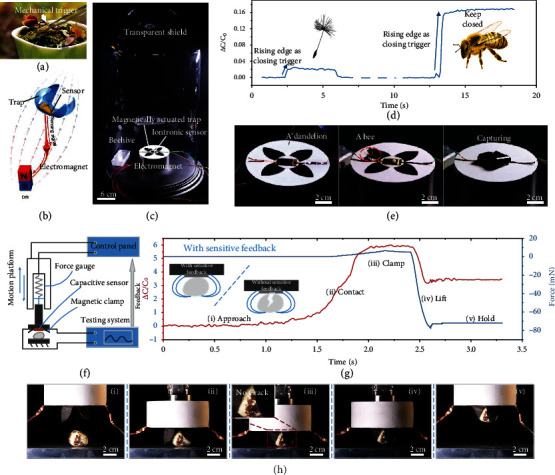
Highly sensitive flexible pressure sensors play an important role to ensure the safety and friendliness during the human-robot interaction process. Microengineering the active layer has been shown to improve performance of pressure sensors. However, the current structural strategy almost relying on axial compression deformation suffers structural stiffening, and together with the limited area growth efficiency of conformal interface, essentially limiting the maximum sensitivity. Here, inspired by the interface contact behavior of gecko's feet, we design a slant hierarchical microstructure to act as an electrode contacting with an ionic gel layer, fundamentally eliminating the pressure resistance and maximizing functional interface expansion to achieving ultrasensitive sensitivity. Such a structuring strategy dramatically improves the relative capacitance change both in the low- and high-pressure region, thereby boosting the sensitivity up to 36000 kPa-1 and effective measurement range up to 300 kPa. To verify the advantages of high sensitivity, the sensor is integrated with a soft magnetic robot to demonstrate a biomimetic Venus flytrap. The ability to perceive weak stimuli allows the sensor to be used as a sensory and feedback window, realizing the capture of small live insects and the transportation of fragile objects.
Copyright © 2022 Yongsong Luo et al.
Conflict of interest statement
The authors declare that there is no conflict of interest regarding the publication of this article.
Figures
References
LinkOut - more resources
Full Text Sources
