

Evaluation of Spatiotemporal Patterns of the Spinal Muscle Coordination Output during Walking in the Exoskeleton
- PMID: 35957264
- PMCID: PMC9370895
- DOI: 10.3390/s22155708
Evaluation of Spatiotemporal Patterns of the Spinal Muscle Coordination Output during Walking in the Exoskeleton
Abstract
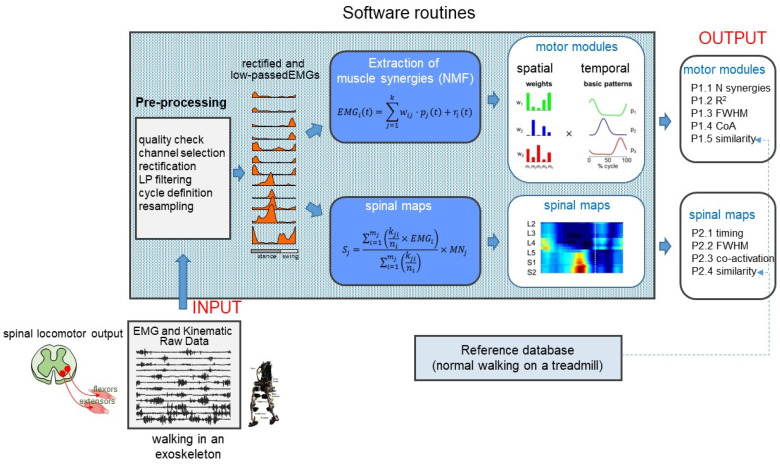
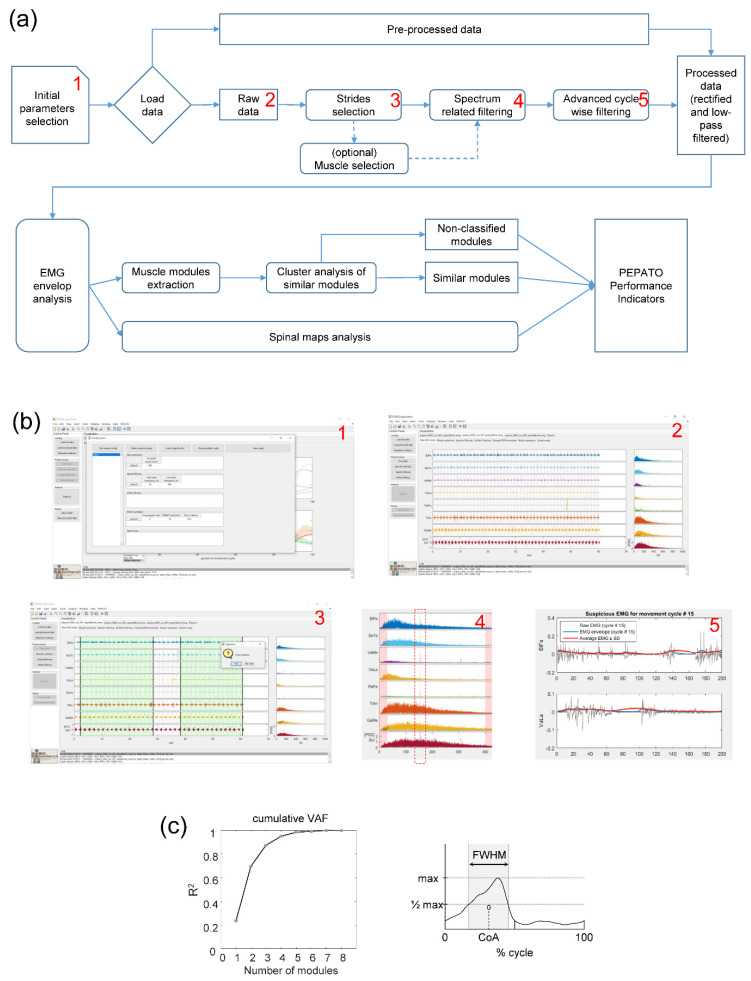
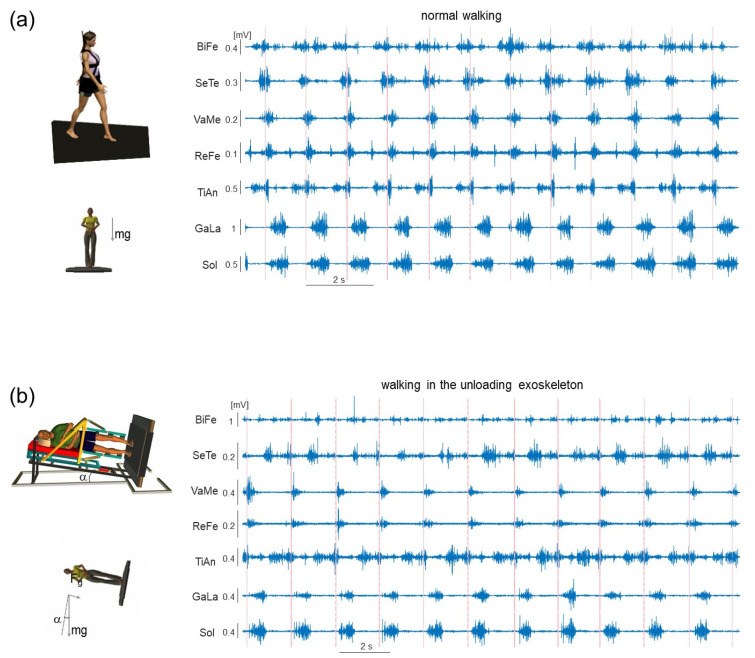
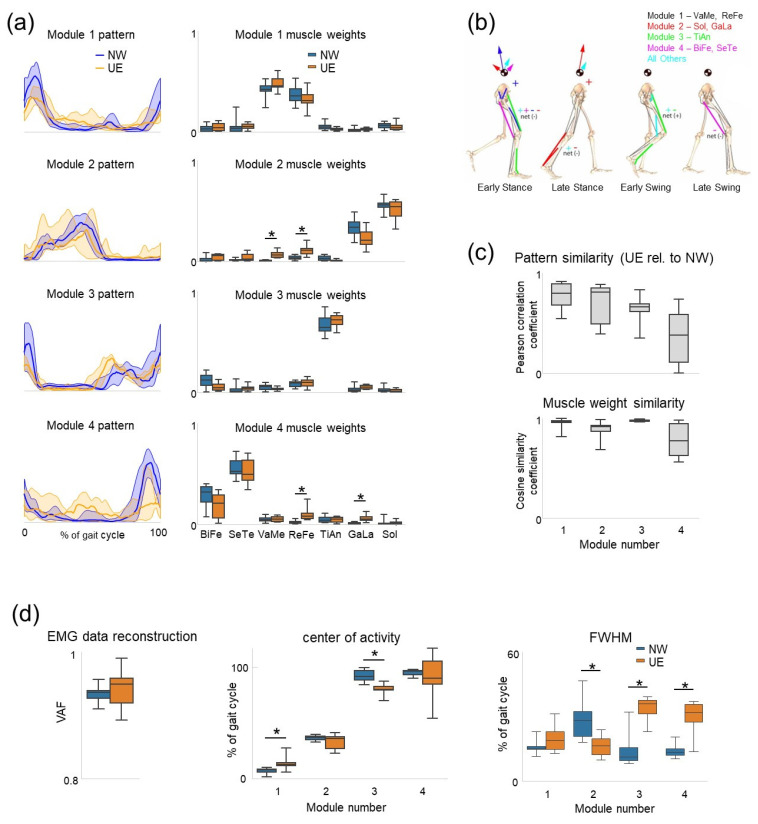
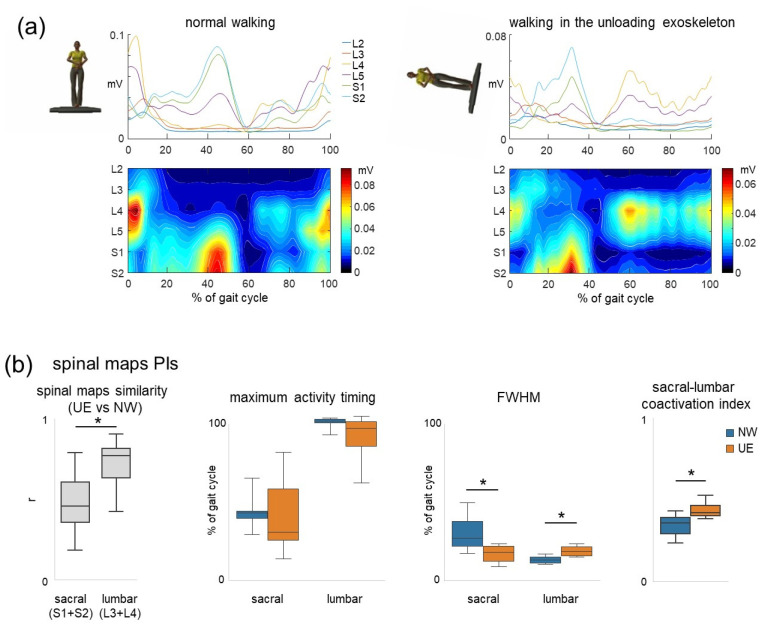
Recent advances in the performance and evaluation of walking in exoskeletons use various assessments based on kinematic/kinetic measurements. While such variables provide general characteristics of gait performance, only limited conclusions can be made about the neural control strategies. Moreover, some kinematic or kinetic parameters are a consequence of the control implemented on the exoskeleton. Therefore, standard indicators based on kinematic variables have limitations and need to be complemented by performance measures of muscle coordination and control strategy. Knowledge about what happens at the spinal cord output level might also be critical for rehabilitation since an abnormal spatiotemporal integration of activity in specific spinal segments may result in a risk for abnormalities in gait recovery. Here we present the PEPATO software, which is a benchmarking solution to assess changes in the spinal locomotor output during walking in the exoskeleton with respect to reference data on normal walking. In particular, functional and structural changes at the spinal cord level can be mapped into muscle synergies and spinal maps of motoneuron activity. A user-friendly software interface guides the user through several data processing steps leading to a set of performance indicators as output. We present an example of the usage of this software for evaluating walking in an unloading exoskeleton that allows a person to step in simulated reduced (the Moon's) gravity. By analyzing the EMG activity from lower limb muscles, the algorithms detected several performance indicators demonstrating differential adaptation (shifts in the center of activity, prolonged activation) of specific muscle activation modules and spinal motor pools and increased coactivation of lumbar and sacral segments. The software is integrated at EUROBENCH facilities to benchmark the performance of walking in the exoskeleton from the point of view of changes in the spinal locomotor output.
Keywords: benchmarking; body unloading; exoskeletons; muscle coordination; spinal locomotor output; walking.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
Evaluation of EMG patterns in children during assisted walking in the exoskeleton.Front Neurosci. 2024 Oct 24;18:1461323. doi: 10.3389/fnins.2024.1461323. eCollection 2024. Front Neurosci. 2024. PMID: 39513047 Free PMC article.
-
Benchmarking the Effects on Human-Exoskeleton Interaction of Trajectory, Admittance and EMG-Triggered Exoskeleton Movement Control.Sensors (Basel). 2023 Jan 10;23(2):791. doi: 10.3390/s23020791. Sensors (Basel). 2023. PMID: 36679587 Free PMC article.
-
Differential activation of lumbar and sacral motor pools during walking at different speeds and slopes.J Neurophysiol. 2019 Aug 1;122(2):872-887. doi: 10.1152/jn.00167.2019. Epub 2019 Jul 10. J Neurophysiol. 2019. PMID: 31291150 Free PMC article.
-
Motor control programs and walking.Neuroscientist. 2006 Aug;12(4):339-48. doi: 10.1177/1073858406287987. Neuroscientist. 2006. PMID: 16840710 Review.
-
Contributions to the understanding of gait control.Dan Med J. 2014 Apr;61(4):B4823. Dan Med J. 2014. PMID: 24814597 Review.
Cited by
-
Muscle Synergy Analysis as a Tool for Assessing the Effectiveness of Gait Rehabilitation Therapies: A Methodological Review and Perspective.Bioengineering (Basel). 2024 Aug 5;11(8):793. doi: 10.3390/bioengineering11080793. Bioengineering (Basel). 2024. PMID: 39199751 Free PMC article. Review.
-
Exoskeleton gait training with spinal cord neuromodulation.Front Hum Neurosci. 2023 May 11;17:1194702. doi: 10.3389/fnhum.2023.1194702. eCollection 2023. Front Hum Neurosci. 2023. PMID: 37250689 Free PMC article. Review.
-
Transferring Sensor-Based Assessments to Clinical Practice: The Case of Muscle Synergies.Sensors (Basel). 2024 Jun 18;24(12):3934. doi: 10.3390/s24123934. Sensors (Basel). 2024. PMID: 38931719 Free PMC article.
-
Evaluation of EMG patterns in children during assisted walking in the exoskeleton.Front Neurosci. 2024 Oct 24;18:1461323. doi: 10.3389/fnins.2024.1461323. eCollection 2024. Front Neurosci. 2024. PMID: 39513047 Free PMC article.
-
The role of physical activity in mitigating age-related changes in the neuromuscular control of gait.NPJ Aging. 2025 Jun 9;11(1):49. doi: 10.1038/s41514-025-00239-8. NPJ Aging. 2025. PMID: 40490469 Free PMC article.
References
-
- Hsu J.D., Michael J., Fisk J. AAOS Atlas of Orthoses and Assistive Devices. MOSBY Elsevier; Philadelphia, PA, USA: 2008.
-
- Cheron G., Duvinage M., De Saedeleer C., Castermans T., Bengoetxea A., Petieau M., Seetharaman K., Hoellinger T., Dan B., Dutoit T., et al. From Spinal Central Pattern Generators to Cortical Network: Integrated BCI for Walking Rehabilitation. Neural Plast. 2012;2012:375148. doi: 10.1155/2012/375148. - DOI - PMC - PubMed
-
- Sale P., Franceschini M., Waldner A., Hesse S. Use of the Robot Assisted Gait Therapy in Rehabilitation of Patients with Stroke and Spinal Cord Injury. Eur. J. Phys. Rehabil. Med. 2012;48:111–121. - PubMed
MeSH terms
Grants and funding
- sub-project PEPATO/H2020-779963 EUROBENCH FSTP-1
- Ricerca Corrente, IRCCS Fondazione Santa Lucia/Italian Ministry of Health
- Ricerca Finalizzata RF-2019-12370232/Italian Ministry of Health
- grant I/006/06/0 and grant 2019-11-U.0/Italian Space Agency
- PRIN grant 2017CBF8NJ_005 and 2020EM9A8X_003/Italian University Ministry
LinkOut - more resources
Full Text Sources
