

A Comprehensive Review of Endogenous EEG-Based BCIs for Dynamic Device Control
- PMID: 35957360
- PMCID: PMC9370865
- DOI: 10.3390/s22155802
A Comprehensive Review of Endogenous EEG-Based BCIs for Dynamic Device Control
Abstract
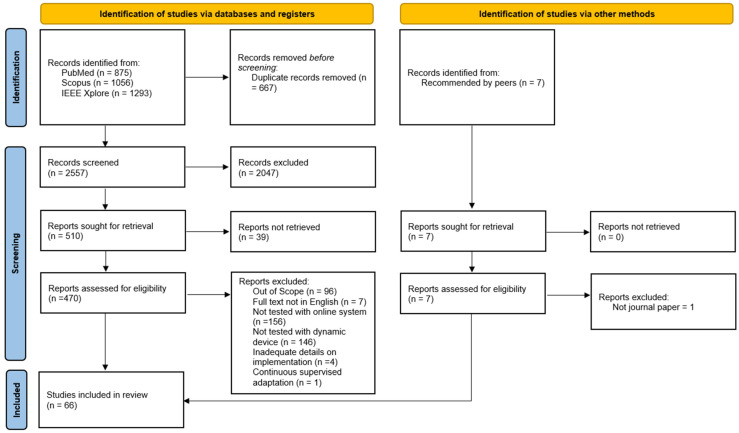
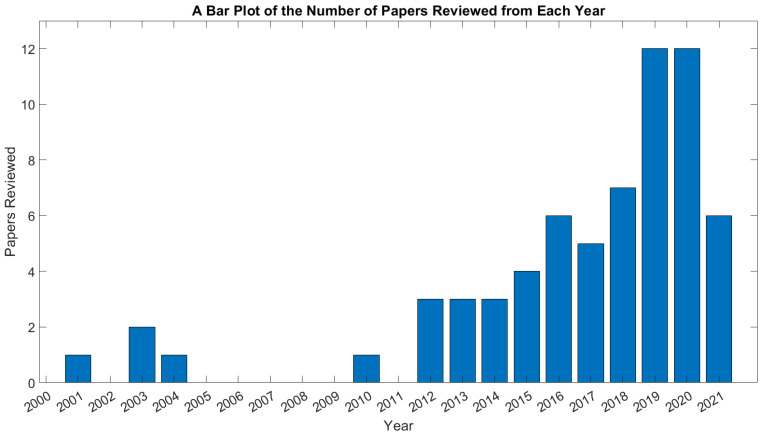
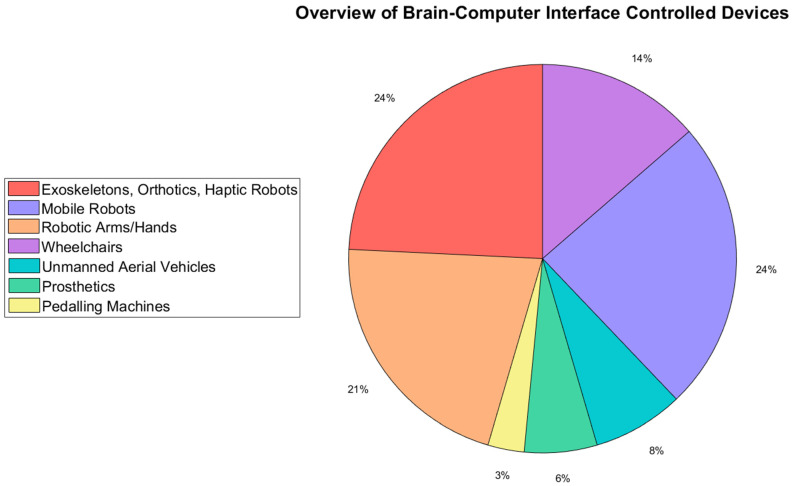
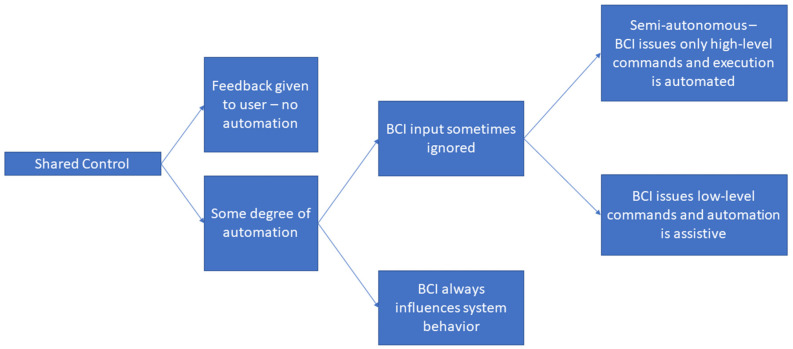
Electroencephalogram (EEG)-based brain-computer interfaces (BCIs) provide a novel approach for controlling external devices. BCI technologies can be important enabling technologies for people with severe mobility impairment. Endogenous paradigms, which depend on user-generated commands and do not need external stimuli, can provide intuitive control of external devices. This paper discusses BCIs to control various physical devices such as exoskeletons, wheelchairs, mobile robots, and robotic arms. These technologies must be able to navigate complex environments or execute fine motor movements. Brain control of these devices presents an intricate research problem that merges signal processing and classification techniques with control theory. In particular, obtaining strong classification performance for endogenous BCIs is challenging, and EEG decoder output signals can be unstable. These issues present myriad research questions that are discussed in this review paper. This review covers papers published until the end of 2021 that presented BCI-controlled dynamic devices. It discusses the devices controlled, EEG paradigms, shared control, stabilization of the EEG signal, traditional machine learning and deep learning techniques, and user experience. The paper concludes with a discussion of open questions and avenues for future work.
Keywords: brain–computer interface (BCI); brain–machine interface (BMI); control; electroencephalogram (EEG); endogenous; motor imagery (MI).
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
A review of critical challenges in MI-BCI: From conventional to deep learning methods.J Neurosci Methods. 2023 Jan 1;383:109736. doi: 10.1016/j.jneumeth.2022.109736. Epub 2022 Oct 29. J Neurosci Methods. 2023. PMID: 36349568 Review.
-
EEG-Based Brain-Computer Interfaces Using Motor-Imagery: Techniques and Challenges.Sensors (Basel). 2019 Mar 22;19(6):1423. doi: 10.3390/s19061423. Sensors (Basel). 2019. PMID: 30909489 Free PMC article. Review.
-
A Human-Machine Joint Learning Framework to Boost Endogenous BCI Training.IEEE Trans Neural Netw Learn Syst. 2024 Dec;35(12):17534-17548. doi: 10.1109/TNNLS.2023.3305621. Epub 2024 Dec 2. IEEE Trans Neural Netw Learn Syst. 2024. PMID: 37647178
-
A review of classification algorithms for EEG-based brain-computer interfaces: a 10 year update.J Neural Eng. 2018 Jun;15(3):031005. doi: 10.1088/1741-2552/aab2f2. Epub 2018 Feb 28. J Neural Eng. 2018. PMID: 29488902 Review.
-
Classification of motor imagery EEG using deep learning increases performance in inefficient BCI users.PLoS One. 2022 Jul 22;17(7):e0268880. doi: 10.1371/journal.pone.0268880. eCollection 2022. PLoS One. 2022. PMID: 35867703 Free PMC article.
Cited by
-
Intention Reasoning for User Action Sequences via Fusion of Object Task and Object Action Affordances Based on Dempster-Shafer Theory.Sensors (Basel). 2025 Mar 22;25(7):1992. doi: 10.3390/s25071992. Sensors (Basel). 2025. PMID: 40218505 Free PMC article.
-
Graph convolution network-based eeg signal analysis: a review.Med Biol Eng Comput. 2025 Jun;63(6):1609-1625. doi: 10.1007/s11517-025-03295-0. Epub 2025 Jan 30. Med Biol Eng Comput. 2025. PMID: 39883372 Review.
-
Paving the Way for Motor Imagery-Based Tele-Rehabilitation through a Fully Wearable BCI System.Sensors (Basel). 2023 Jun 23;23(13):5836. doi: 10.3390/s23135836. Sensors (Basel). 2023. PMID: 37447686 Free PMC article.
-
Development and evaluation of a non-invasive brain-spine interface using transcutaneous spinal cord stimulation.J Neuroeng Rehabil. 2025 Apr 25;22(1):95. doi: 10.1186/s12984-025-01628-6. J Neuroeng Rehabil. 2025. PMID: 40281628 Free PMC article.
-
Incidence and dynamics of mobility device use among community-dwelling older adults in the United States.J Elder Policy. 2024 Oct;3(2):70-94. doi: 10.1002/jey2.12011. Epub 2024 Sep 25. J Elder Policy. 2024. PMID: 40708911 Free PMC article.
References
-
- Tang X., Li W., Li X., Ma W., Dang X. Motor Imagery EEG Recognition Based on Conditional Optimization Empirical Mode Decomposition and Multi-Scale Convolutional Neural Network. Expert Syst. Appl. 2020;149:113285. doi: 10.1016/j.eswa.2020.113285. - DOI
-
- Perdikis S., Millan J.d.R. Brain-Machine Interfaces: A Tale of Two Learners. IEEE Syst. Man Cybern. Mag. 2020;6:12–19. doi: 10.1109/MSMC.2019.2958200. - DOI
-
- Leeb R., Tonin L., Rohm M., Desideri L., Carlson T., Millán J.D.R. Towards Independence: A BCI Telepresence Robot for People with Severe Motor Disabilities. Proc. IEEE. 2015;103:969–982. doi: 10.1109/JPROC.2015.2419736. - DOI
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
