

Design and development of orchard autonomous navigation spray system
- PMID: 35979071
- PMCID: PMC9376256
- DOI: 10.3389/fpls.2022.960686
Design and development of orchard autonomous navigation spray system
Abstract
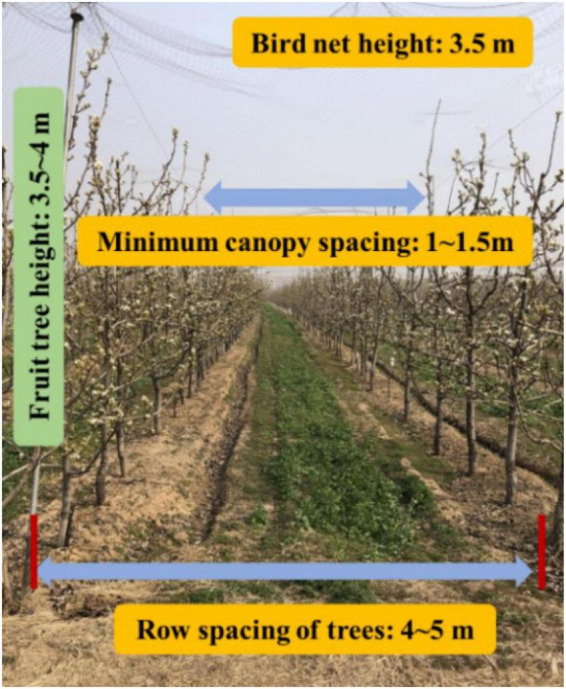
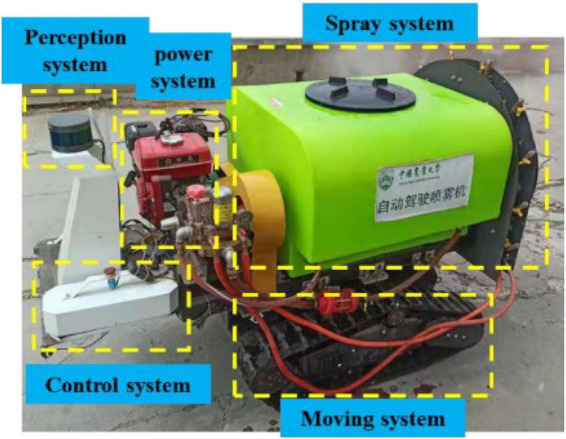
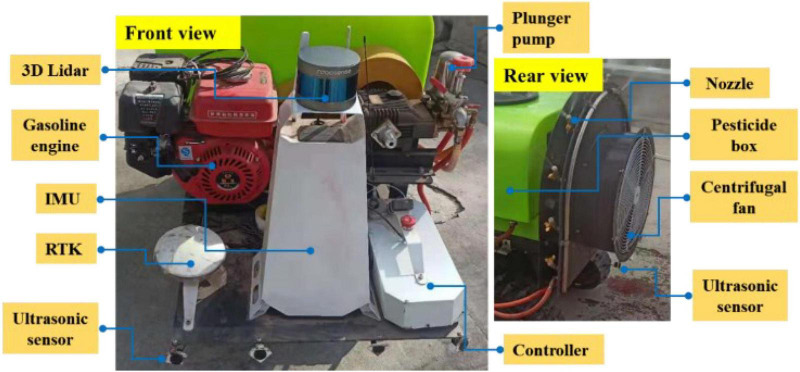
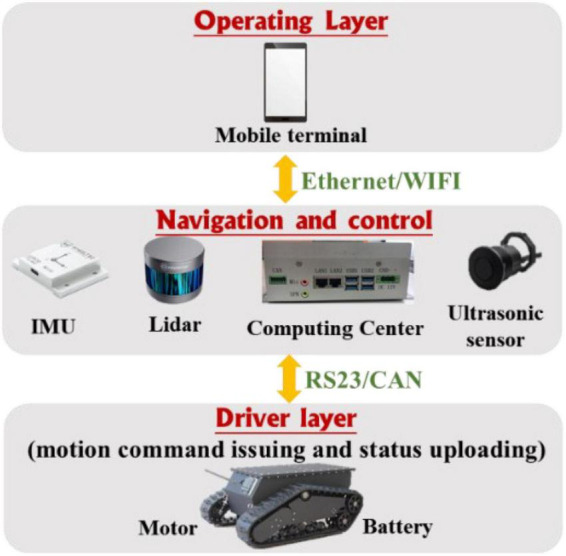
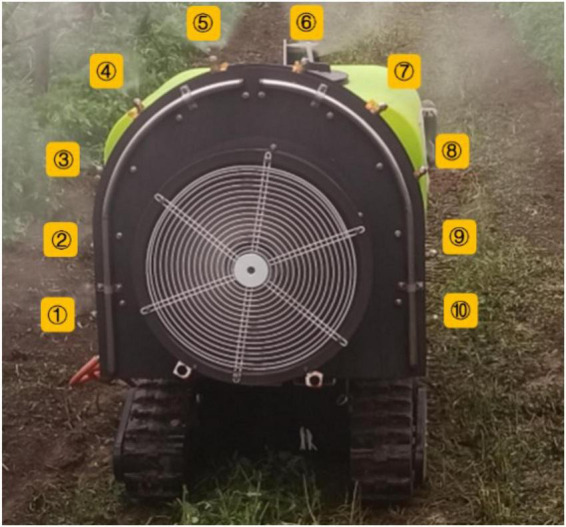
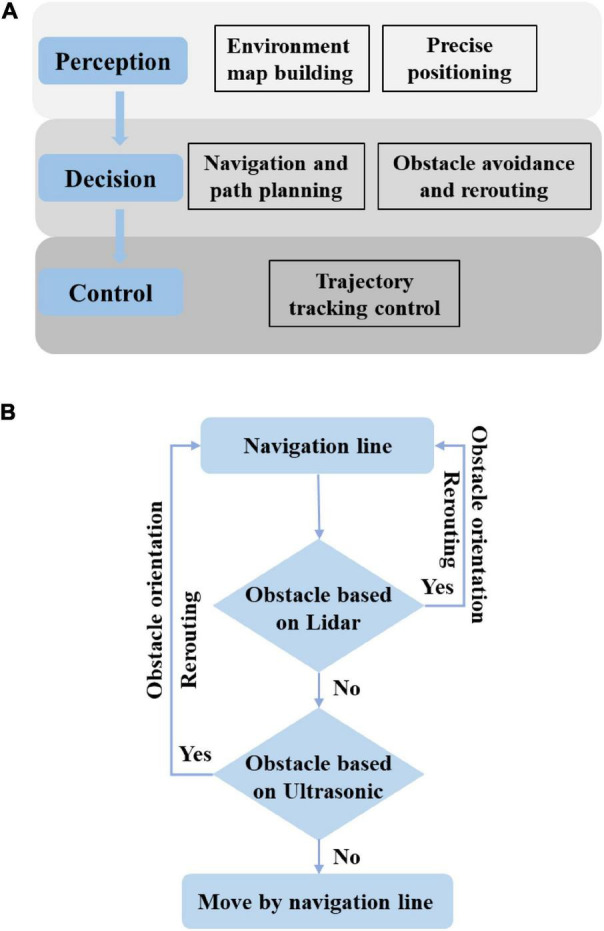
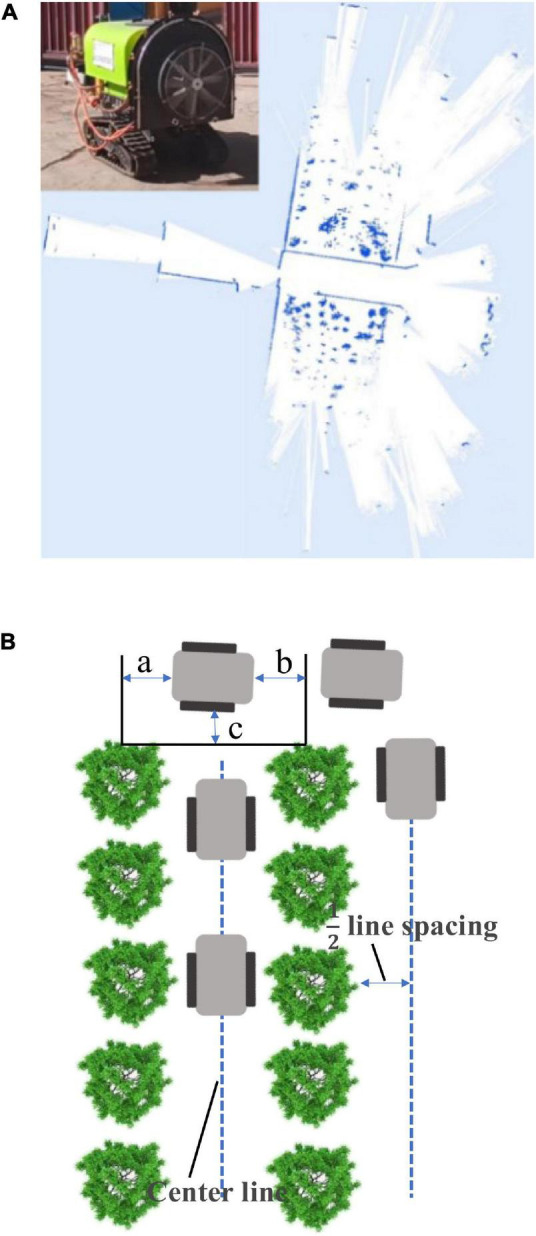
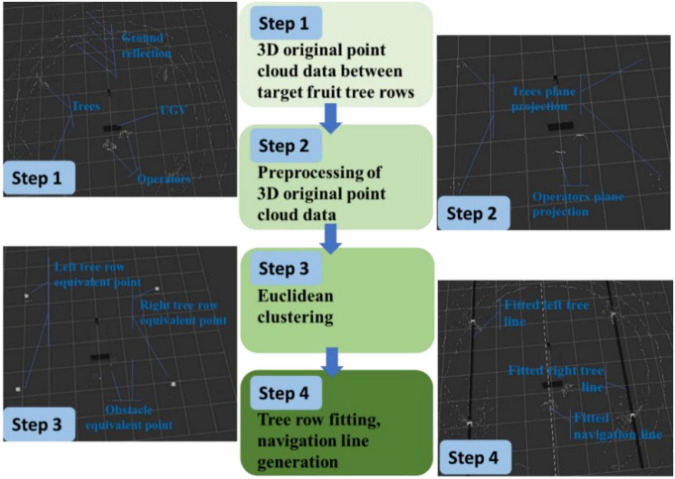
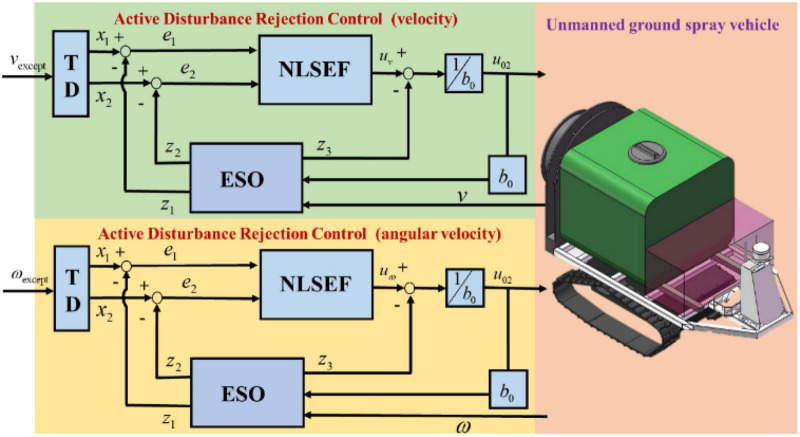
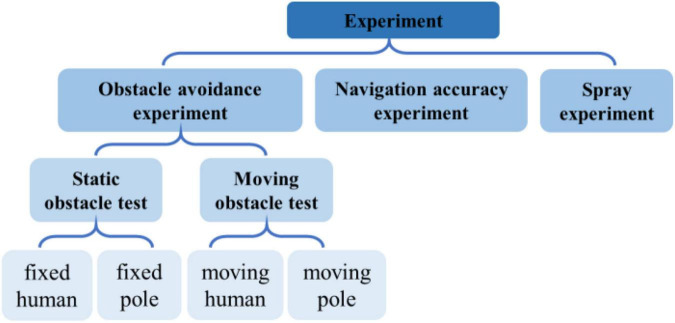
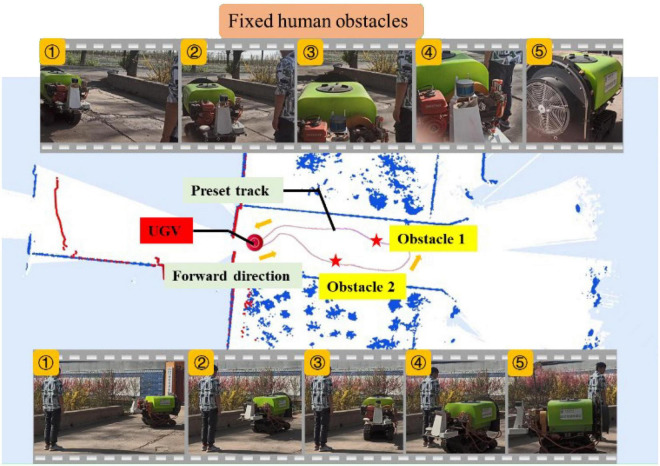
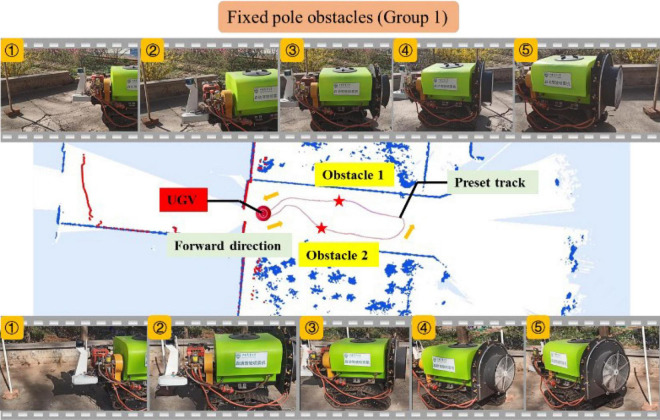
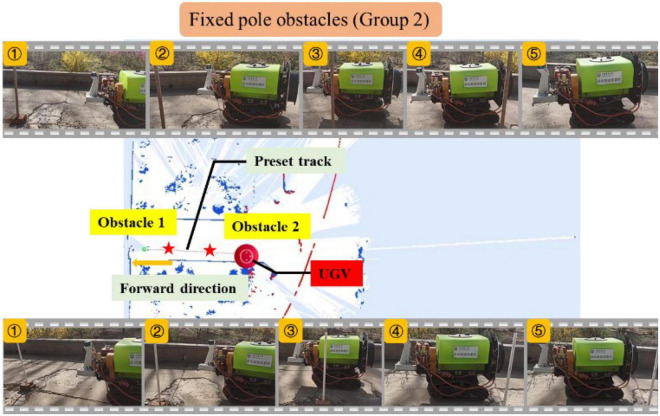
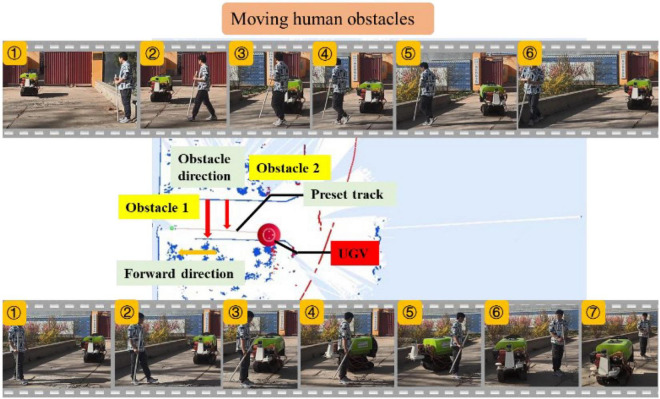
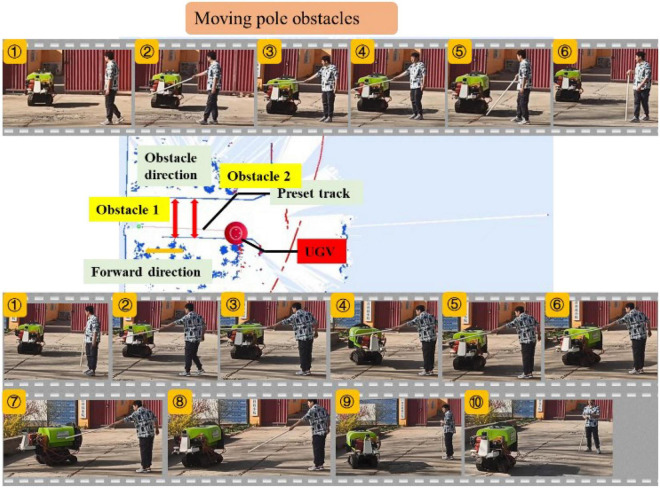
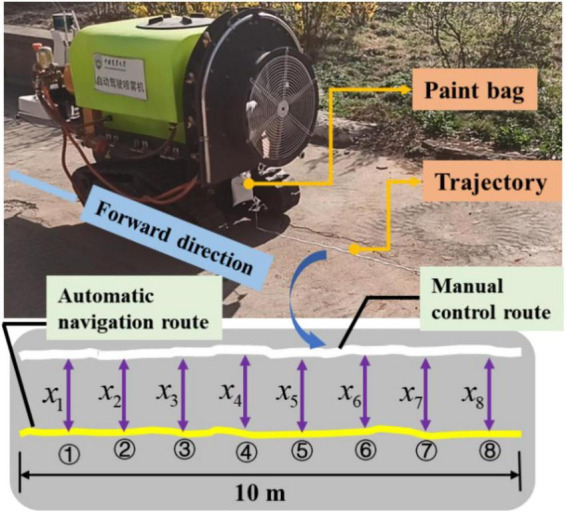
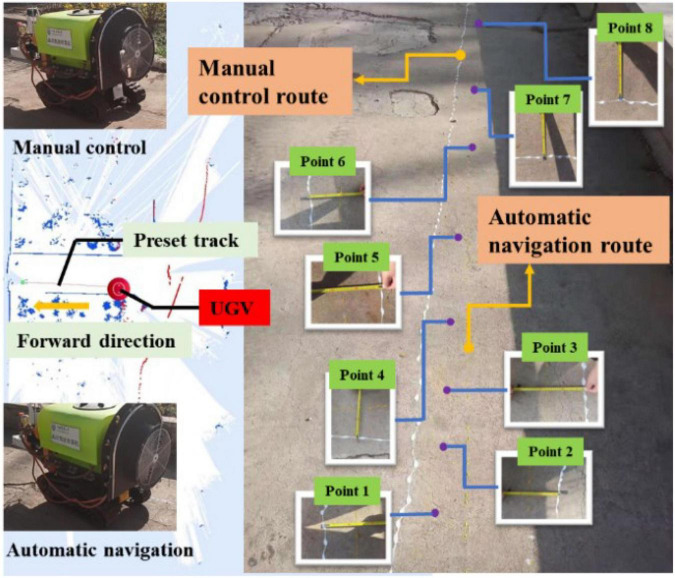
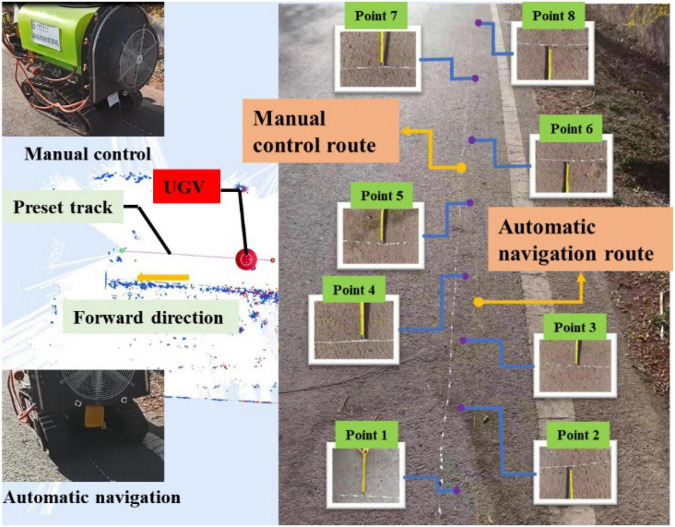
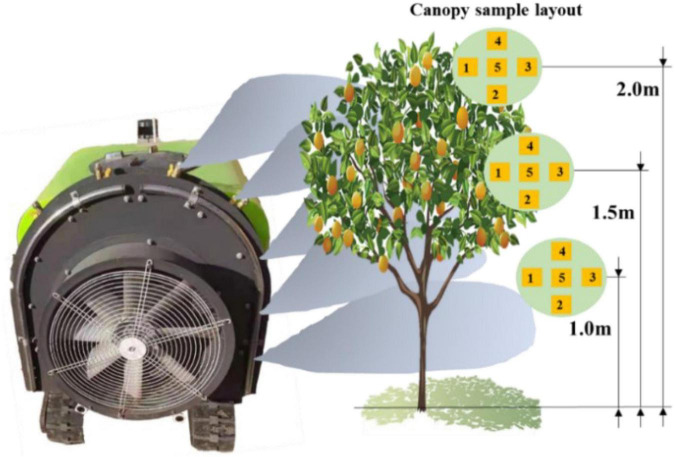
Driven by the demand for efficient plant protection in orchards, the autonomous navigation system for orchards is hereby designed and developed in this study. According to the three modules of unmanned system "perception-decision-control," the environment perception and map construction strategy based on 3D lidar is constructed for the complex environment in orchards. At the same time, millimeter-wave radar is further selected for multi-source information fusion for the perception of obstacles. The extraction of orchard navigation lines is achieved by formulating a four-step extraction strategy according to the obtained lidar data. Finally, aiming at the control problem of plant protection machine, the ADRC control strategy is adopted to enhance the noise immunity of the system. Different working conditions are designed in the experimental section for testing the obstacle avoidance performance and navigation accuracy of the autonomous navigation sprayer. The experimental results show that the unmanned vehicle can identify the obstacle quickly and make an emergency stop and find a rather narrow feasible area when a moving person or a different thin column is used as an obstacle. Many experiments have shown a safe distance for obstacle avoidance about 0.5 m, which meets the obstacle avoidance requirements. In the navigation accuracy experiment, the average navigation error in both experiments is within 15 cm, satisfying the requirements for orchard spray operation. A set of spray test experiments are designed in the final experimental part to further verify the feasibility of the system developed by the institute, and the coverage rate of the leaves of the canopy is about 50%.
Keywords: autonomous navigation; crawler sprayer; laser lidar; obstacle avoidance; orchard plant protection.
Copyright © 2022 Wang, Song, Qi, Yuan, Wu, Zhang, Liu, Liu and He.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures

References
-
- Bergerman M., Maeta S. M., Zhang J., Freitas G. M., Hamner B., Singh S., et al. (2015). Robot farmers: Autonomous orchard vehicles help tree fruit production. IEEE Robot. Autom. Mag. 22 54–63. 10.1109/MRA.2014.2369292 - DOI
-
- Blok P. M., van Boheemen K., van Evert F. K., IJsselmuiden J., Kim G.-H. (2019). Robot navigation in orchards with localization based on Particle filter and Kalman filter. Comput. Electron. Agricult. 157 261–269. 10.1016/j.compag.2018.12.046 - DOI
-
- Boatwright H., Schnabel G. (2020). “Evaluation of laser-guided air-blast sprayer on pest and disease control in peach orchards,” in Proceedings of the Meeting of the southern division of the American Phytopathological Society (APS), Vol. 110, Charleston, SC, 2.
LinkOut - more resources
Full Text Sources
Other Literature Sources