

Logic-enabled textiles
- PMID: 35994641
- PMCID: PMC9436326
- DOI: 10.1073/pnas.2202118119
Logic-enabled textiles
Abstract
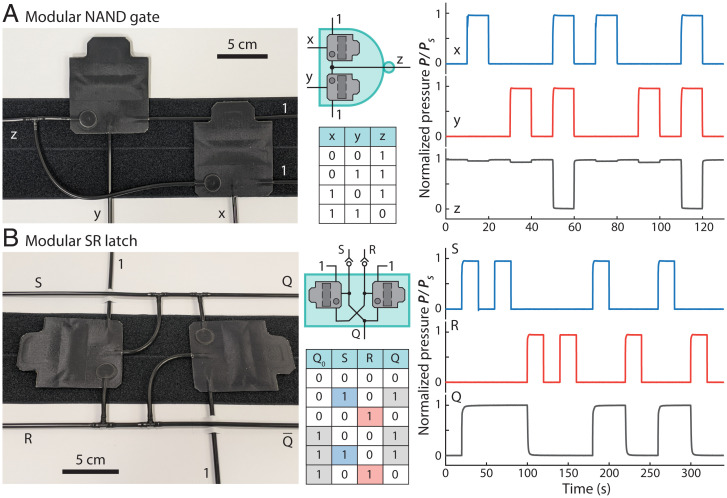
Textiles hold great promise as a soft yet durable material for building comfortable robotic wearables and assistive devices at low cost. Nevertheless, the development of smart wearables composed entirely of textiles has been hindered by the lack of a viable sheet-based logic architecture that can be implemented using conventional fabric materials and textile manufacturing processes. Here, we develop a fully textile platform for embedding pneumatic digital logic in wearable devices. Our logic-enabled textiles support combinational and sequential logic functions, onboard memory storage, user interaction, and direct interfacing with pneumatic actuators. In addition, they are designed to be lightweight, easily integrable into regular clothing, made using scalable fabrication techniques, and durable enough to withstand everyday use. We demonstrate a textile computer capable of input-driven digital logic for controlling untethered wearable robots that assist users with functional limitations. Our logic platform will facilitate the emergence of future wearables powered by embedded fluidic logic that fully leverage the innate advantages of their textile construction.
Keywords: assistive devices; fluidic logic; information storage; logic gates; wearable robots.
Conflict of interest statement
The authors declare no competing interest.
Figures





References
-
- Harris J., Textiles, 5,000 Years: An International History and Illustrated Survey (H. N. Abrams, 1993).
-
- Persson N.-K., Martinez J. G., Zhong Y., Maziz A., Jager E. W. H., Actuating textiles: Next generation of smart textiles. Adv. Mater. Technol. 3, 1700397 (2018).
-
- Chen G., Li Y., Bick M., Chen J., Smart textiles for electricity generation. Chem. Rev. 120, 3668–3720 (2020). - PubMed
-
- Shi J., et al. , Smart textile-integrated microelectronic systems for wearable applications. Adv. Mater. 32, e1901958 (2020). - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
