

Infrared Target Detection Based on Joint Spatio-Temporal Filtering and L1 Norm Regularization
- PMID: 36016018
- PMCID: PMC9413064
- DOI: 10.3390/s22166258
Infrared Target Detection Based on Joint Spatio-Temporal Filtering and L1 Norm Regularization
Abstract
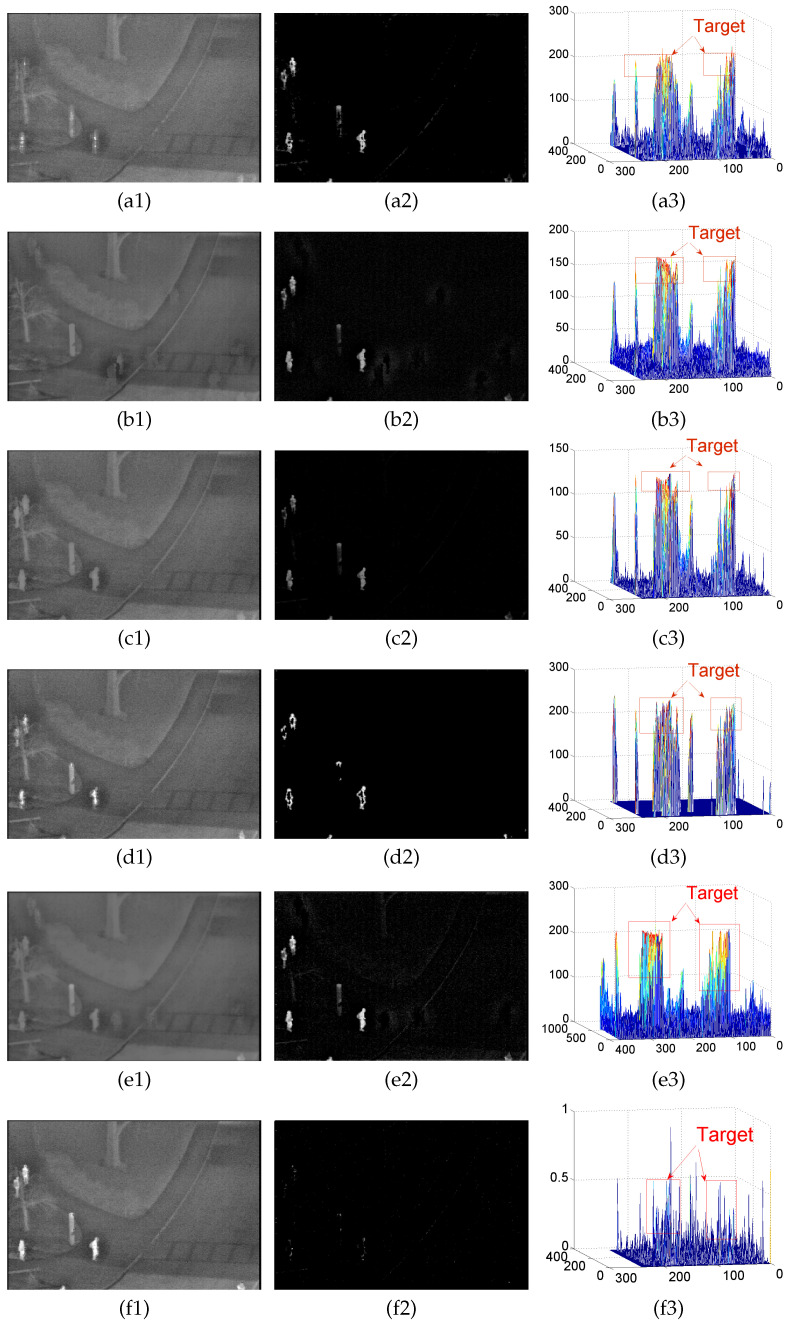
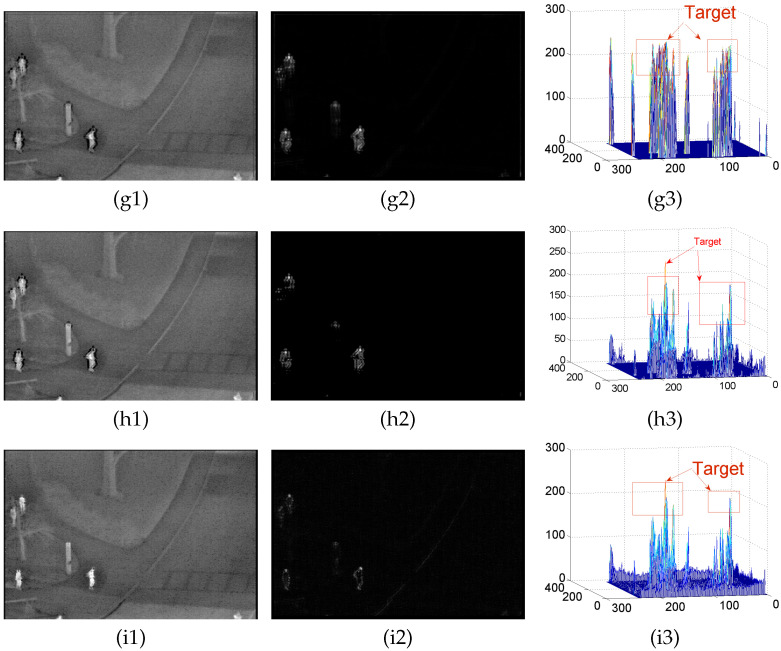
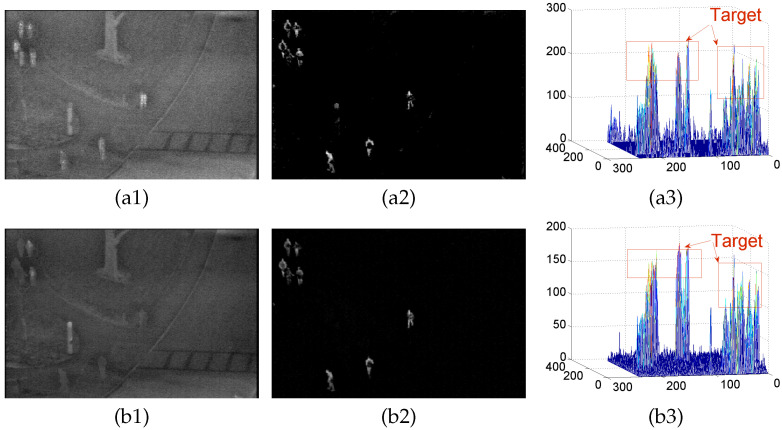
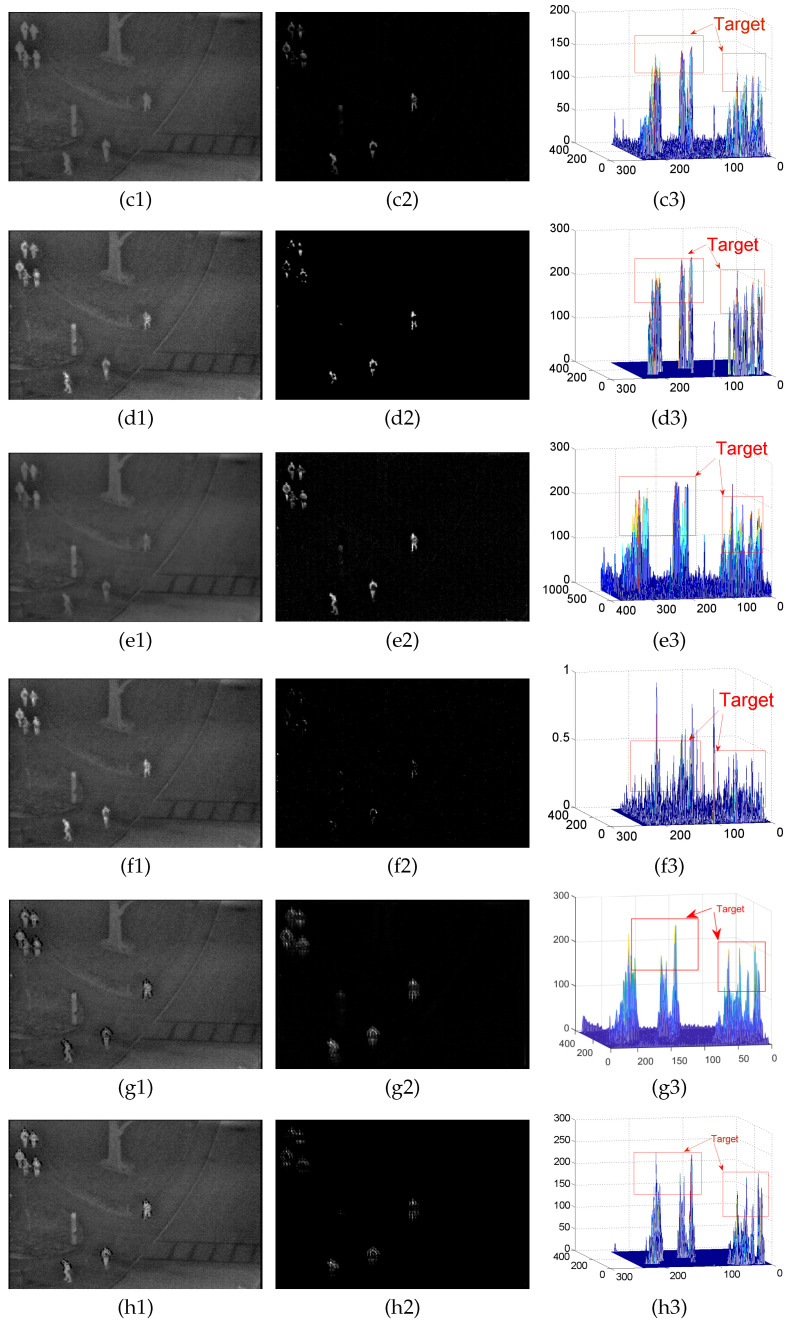
Infrared target detection is often disrupted by a complex background, resulting in a high false alarm and low target recognition. This paper proposes a robust principal component decomposition model with joint spatial and temporal filtering and L1 norm regularization to effectively suppress the complex backgrounds. The model establishes a new anisotropic Gaussian kernel diffusion function, which exploits the difference between the target and the background in the spatial domain to suppress the edge contours. Furthermore, in order to suppress the dynamically changing background, we construct an inversion model that combines temporal domain information and L1 norm regularization to globally constrain the low rank characteristics of the background, and characterize the target sparse component with L1 norm. Finally, the overlapping multiplier method is used for decomposition and reconstruction to complete the target detection.Through relevant experiments, the proposed background modeling method in this paper has a better background suppression effect in different scenes. The average values of the three evaluation indexes, SSIM, BSF and IC, are 0.986, 88.357 and 18.967, respectively. Meanwhile, the proposed detection method obtains a higher detection rate compared with other algorithms under the same false alarm rate.
Keywords: anisotropy; detection; infrared target; robust principal component decomposition model; spatio-temporal filtering.
Conflict of interest statement
The authors declare no conflict of interest.
Figures























References
-
- Fan X., Guo H., Xu Z., Li B. Dim and Small Targets Detection in Sequence Images Based on spatio-temporal Motion Characteristics. Math. Probl. Eng. 2020;2020:7164859.
-
- Li Q., Nie J., Qu S. A small target detection algorithm in infrared image by combining multi-response fusion and local contrast enhancement. Opt.-Int. J. Light Electron. Opt. 2021;241:166919. doi: 10.1016/j.ijleo.2021.166919. - DOI
-
- Deng H., Sun X., Liu M., Ye C. Infrared small-target detection using multiscale gray difference weighted image entropy. IEEE Trans. Aerosp. Electron. Syst. 2016;52:60–72. doi: 10.1109/TAES.2015.140878. - DOI
-
- Xiong B., Huang X., Wang M. Local Gradient Field Feature Contrast Measure for Infrared Small Target Detection. IEEE Geosci. Remote. Sens. Lett. 2020;18:553–557. doi: 10.1109/LGRS.2020.2976208. - DOI
-
- Fan X., Xu Z., Zhang J., Huang Y., Peng Z., Wei Z., Guo H. Dim small target detection based on high-order cumulant of motion estimation. Infrared Phys. Technol. 2019;99:86–101. doi: 10.1016/j.infrared.2019.04.008. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
