

Liquid Metal-Elastomer Composites with Dual-Energy Transmission Mode for Multifunctional Miniature Untethered Magnetic Robots
- PMID: 36065052
- PMCID: PMC9631051
- DOI: 10.1002/advs.202203730
Liquid Metal-Elastomer Composites with Dual-Energy Transmission Mode for Multifunctional Miniature Untethered Magnetic Robots
Abstract
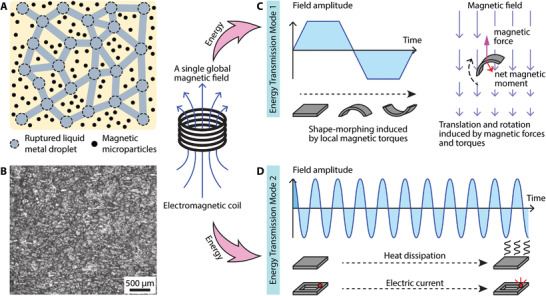
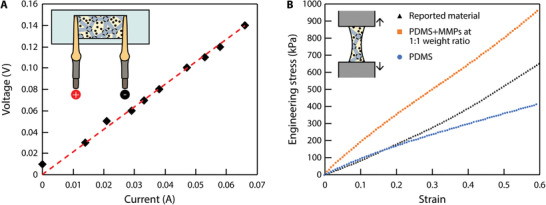
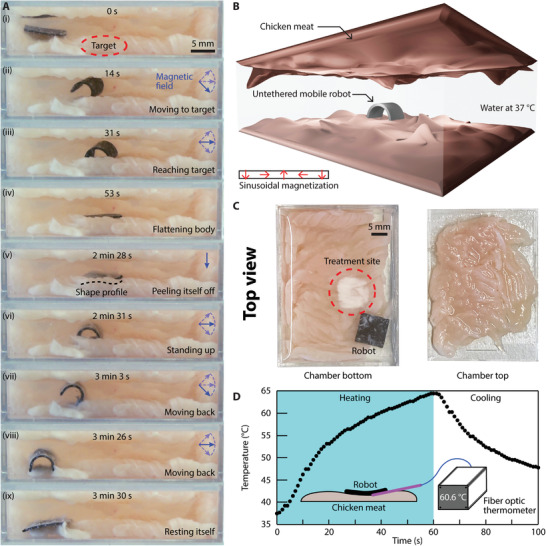
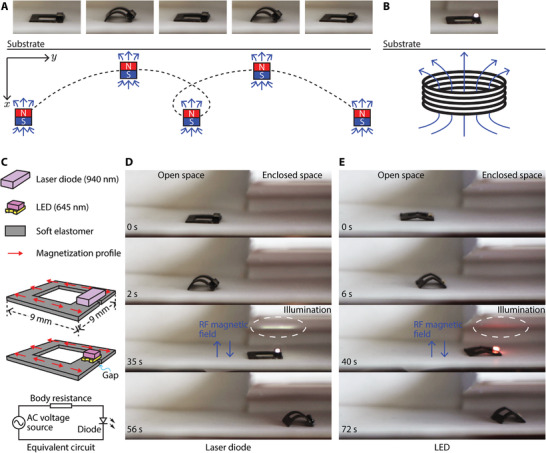
Miniature untethered robots attract growing interest as they have become more functional and applicable to disruptive biomedical applications recently. Particularly, the soft ones among them exhibit unique merits of compliance, versatility, and agility. With scarce onboard space, these devices mostly harvest energy from environment or physical fields, such as magnetic and acoustic fields and patterned lights. In most cases, one device only utilizes one energy transmission mode (ETM) in powering its activities to achieve programmed tasks, such as locomotion and object manipulation. But real-world tasks demand multifunctional devices that require more energy in various forms. This work reports a liquid metal-elastomer composite with dual-ETM using one magnetic field for miniature untethered multifunctional robots. The first ETM uses the low-frequency (<100 Hz) field component to induce shape-morphing, while the second ETM employs energy transmitted via radio-frequency (20 kHz-300 GHz) induction to power onboard electronics and generate excess heat, enabling new capabilities. These new functions do not disturb the shape-morphing actuated using the first ETM. The reported material enables the integration of electric and thermal functionalities into soft miniature robots, offering a wealth of inspirations for multifunctional miniature robots that leverage developments in electronics to exhibit usefulness beyond self-locomotion.
Keywords: liquid metal; magnetic soft composite; miniature mobile robotics; soft robotics; wireless energy transmission.
© 2022 The Authors. Advanced Science published by Wiley-VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
Multi-functional soft-bodied jellyfish-like swimming.Nat Commun. 2019 Jul 2;10(1):2703. doi: 10.1038/s41467-019-10549-7. Nat Commun. 2019. PMID: 31266939 Free PMC article.
-
Programmable Morphing Hydrogels for Soft Actuators and Robots: From Structure Designs to Active Functions.Acc Chem Res. 2022 Jun 7;55(11):1533-1545. doi: 10.1021/acs.accounts.2c00046. Epub 2022 Apr 12. Acc Chem Res. 2022. PMID: 35413187
-
Liquid Crystal Elastomer-Based Magnetic Composite Films for Reconfigurable Shape-Morphing Soft Miniature Machines.Adv Mater. 2021 Feb;33(8):e2006191. doi: 10.1002/adma.202006191. Epub 2021 Jan 14. Adv Mater. 2021. PMID: 33448077 Free PMC article.
-
Shape memory materials for electrically-powered soft machines.J Mater Chem B. 2020 Jun 7;8(21):4539-4551. doi: 10.1039/d0tb00392a. Epub 2020 May 6. J Mater Chem B. 2020. PMID: 32373836 Review.
-
A Review of Magnetic Elastomers and Their Role in Soft Robotics.Front Robot AI. 2020 Oct 23;7:588391. doi: 10.3389/frobt.2020.588391. eCollection 2020. Front Robot AI. 2020. PMID: 33501346 Free PMC article. Review.
Cited by
-
Magnetically driven capsules with multimodal response and multifunctionality for biomedical applications.Nat Commun. 2024 Feb 29;15(1):1839. doi: 10.1038/s41467-024-46046-9. Nat Commun. 2024. PMID: 38424039 Free PMC article.
-
Pangolin-inspired untethered magnetic robot for on-demand biomedical heating applications.Nat Commun. 2023 Jun 20;14(1):3320. doi: 10.1038/s41467-023-38689-x. Nat Commun. 2023. PMID: 37339969 Free PMC article.
-
Developments and Challenges of Miniature Piezoelectric Robots: A Review.Adv Sci (Weinh). 2023 Dec;10(36):e2305128. doi: 10.1002/advs.202305128. Epub 2023 Oct 27. Adv Sci (Weinh). 2023. PMID: 37888844 Free PMC article. Review.
-
Bio-Mimic, Fast-Moving, and Flippable Soft Piezoelectric Robots.Adv Sci (Weinh). 2023 Jul;10(20):e2300673. doi: 10.1002/advs.202300673. Epub 2023 May 10. Adv Sci (Weinh). 2023. PMID: 37163730 Free PMC article.
-
Coaxially printed magnetic mechanical electrical hybrid structures with actuation and sensing functionalities.Nat Commun. 2023 Jul 22;14(1):4428. doi: 10.1038/s41467-023-40109-z. Nat Commun. 2023. PMID: 37481621 Free PMC article.
References
-
- Hu W., Lum G. Z., Mastrangeli M., Sitti M., Nature 2018, 554, 81. - PubMed
-
- Ren T., Chen P., Gu L., Ogut M. G., Demirci U., Adv. Mater. 2020, 32, 1905713. - PubMed
-
- Son D., Gilbert H., Sitti M., Soft Rob. 2020, 7, 10. - PubMed
-
- Lin D., Wang J., Jiao N., Wang Z., Liu L., Adv. Intell. Syst. 2021, 3, 2000211.
Publication types
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources