Super-resolution wearable electrotactile rendering system
- PMID: 36083898
- PMCID: PMC9462686
- DOI: 10.1126/sciadv.abp8738
Super-resolution wearable electrotactile rendering system
Abstract
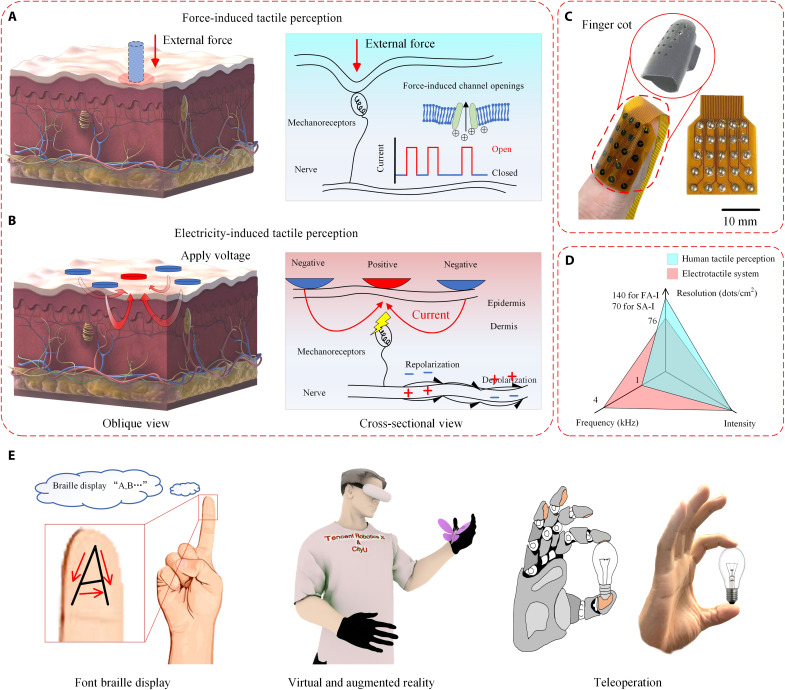
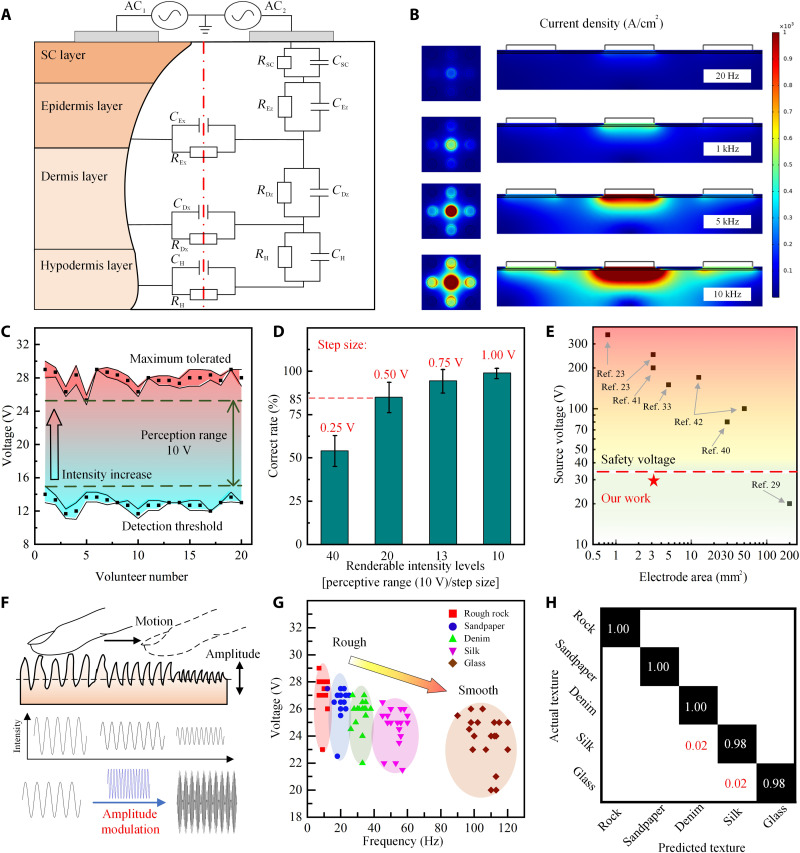
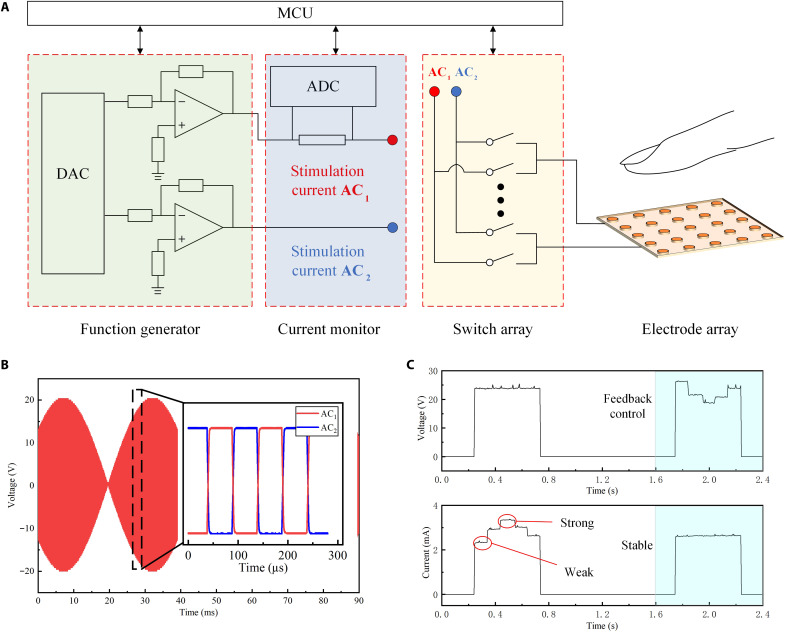
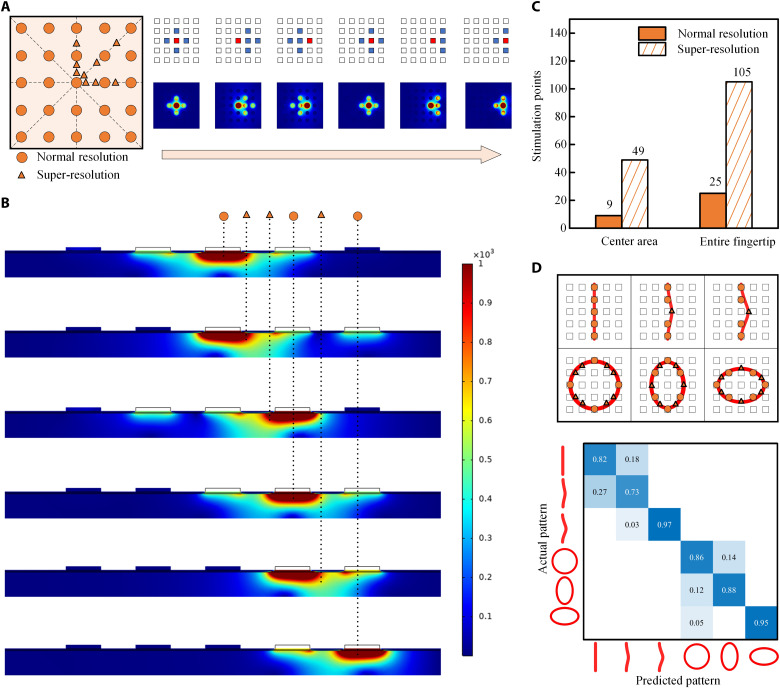
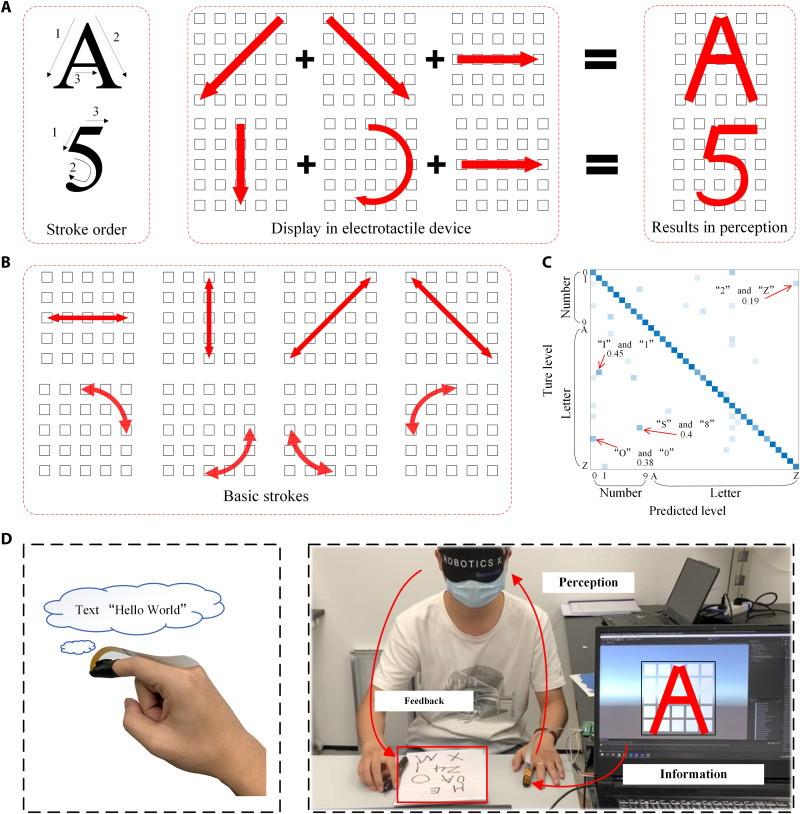
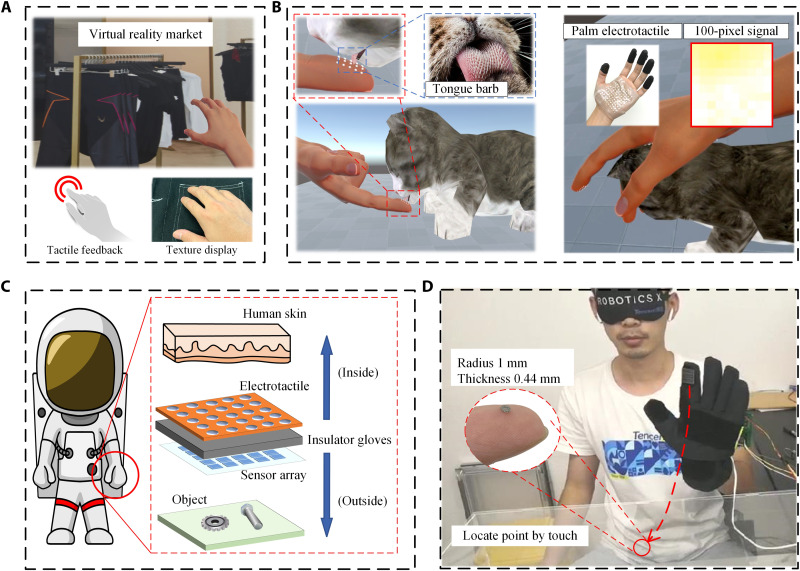
The human somatosensory system is capable of extracting features with millimeter-scale spatial resolution and submillisecond temporal precision. Current technologies that can render tactile stimuli with such high definition are neither portable nor easily accessible. Here, we present a wearable electrotactile rendering system that elicits tactile stimuli with both high spatial resolution (76 dots/cm2) and rapid refresh rates (4 kHz), because of a previously unexplored current-steering super-resolution stimulation technique. For user safety, we present a high-frequency modulation method to reduce the stimulation voltage to as low as 13 V. The utility of our high spatiotemporal tactile rendering system is highlighted in applications such as braille display, virtual reality shopping, and digital virtual experiences. Furthermore, we integrate our setup with tactile sensors to transmit fine tactile features through thick gloves used by firefighters, allowing tiny objects to be localized based on tactile sensing alone.
Figures
References
-
- Lee W. W., Tan Y. J., Yao H., Li S., See H. H., Hon M., Ng K. A., Xiong B., Ho J. S., Tee B. C. K., A neuro-inspired artificial peripheral nervous system for scalable electronic skins. Sci. Robot. 4, eaax2198 (2019). - PubMed
-
- Sundaram S., Kellnhofer P., Li Y., Zhu J. Y., Torralba A., Matusik W., Learning the signatures of the human grasp using a scalable tactile glove. Nature 569, 698–702 (2019). - PubMed
LinkOut - more resources
Full Text Sources