

On the shape-dependent propulsion of nano- and microparticles by traveling ultrasound waves
- PMID: 36132771
- PMCID: PMC9417689
- DOI: 10.1039/d0na00099j
On the shape-dependent propulsion of nano- and microparticles by traveling ultrasound waves
Abstract
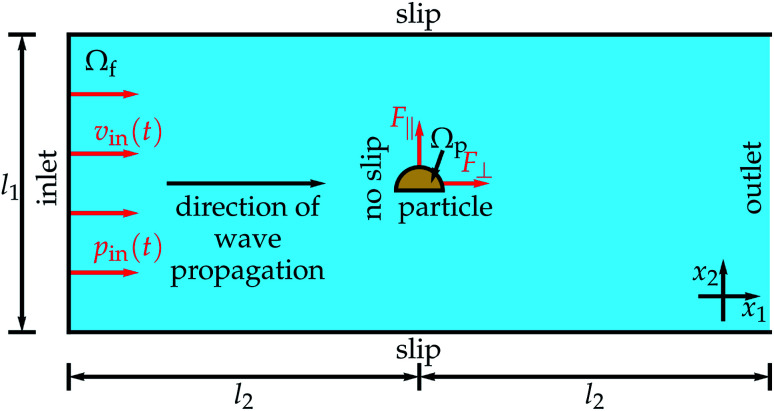
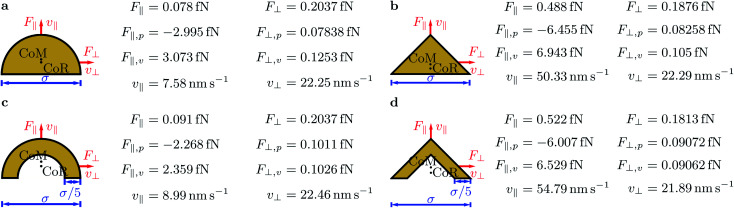
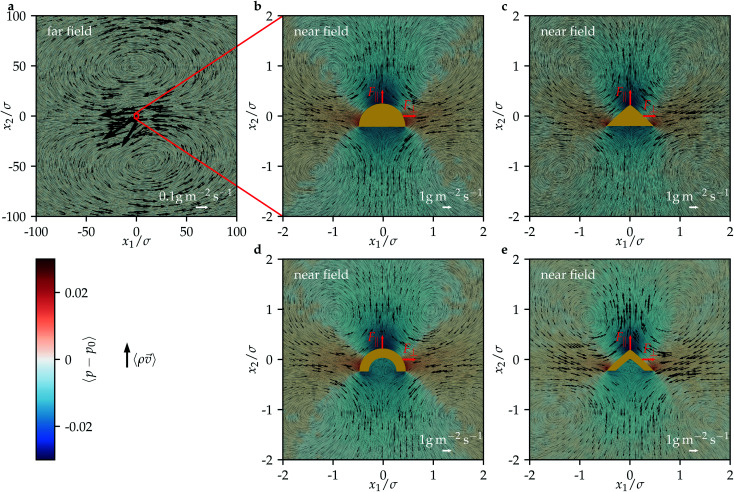
We address the propulsion mechanism of ultrasound-propelled nano- and microparticles that are exposed to a traveling ultrasound wave. Based on direct computational fluid dynamics simulations, we study the effect of two important aspects of the particle shape on the propulsion: rounded vs. pointed and filled vs. hollow shapes. We also study the flow field generated around such particles. Our results reveal that pointedness leads to an increase of the propulsion speed, whereas it is not significantly affected by hollowness. Furthermore, we show that the flow field near to ultrasound-propelled particles can look similar to the flow field generated by pusher squirmers.
This journal is © The Royal Society of Chemistry.
Conflict of interest statement
There are no conflicts of interest to declare.
Figures
References
-
- Bechinger C. Di Leonardo R. Löwen H. Reichhardt C. Volpe G. Volpe G. Active particles in complex and crowded environments. Rev. Mod. Phys. 2016;88:045006. doi: 10.1103/RevModPhys.88.045006. - DOI
-
- Xu T. Xu L. Zhang X. Ultrasound propulsion of micro-/nanomotors. Appl. Mater. Today. 2017;9:493–503. doi: 10.1016/j.apmt.2017.07.011. - DOI
-
- Kim K. Guo J. Liang Z. Fan D. Artificial micro/nanomachines for bioapplications: biochemical delivery and diagnostic sensing. Adv. Funct. Mater. 2018;28:1705867. doi: 10.1002/adfm.201705867. - DOI
LinkOut - more resources
Full Text Sources