

Soft shape-programmable surfaces by fast electromagnetic actuation of liquid metal networks
- PMID: 36151092
- PMCID: PMC9508113
- DOI: 10.1038/s41467-022-31092-y
Soft shape-programmable surfaces by fast electromagnetic actuation of liquid metal networks
Abstract
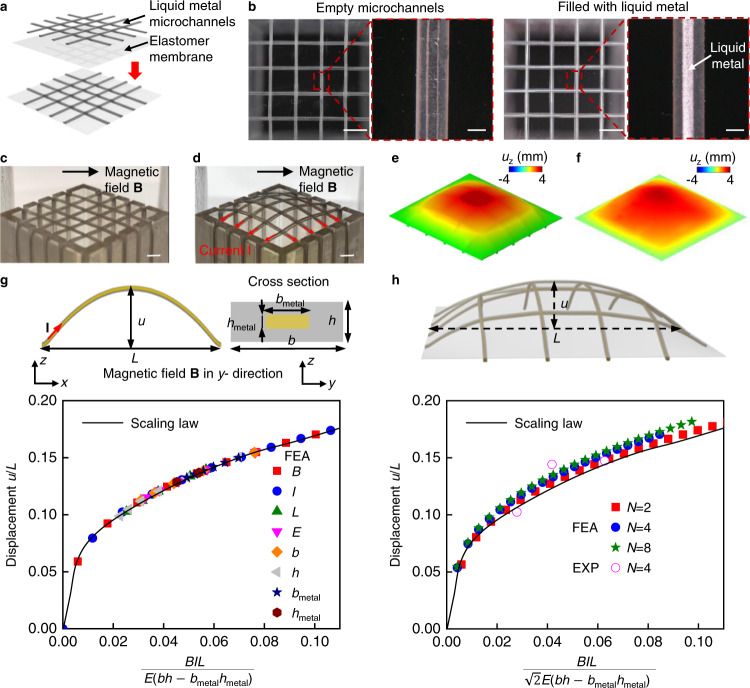
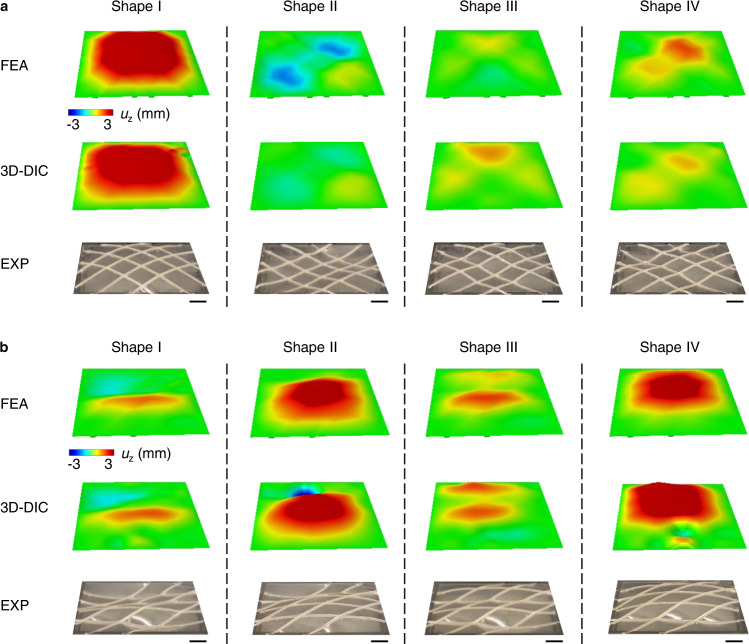
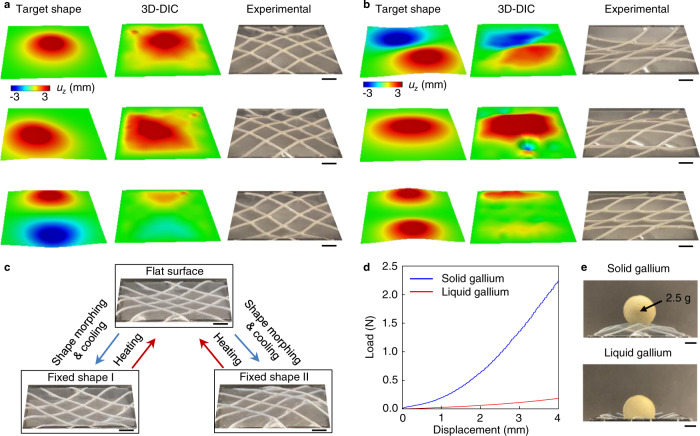
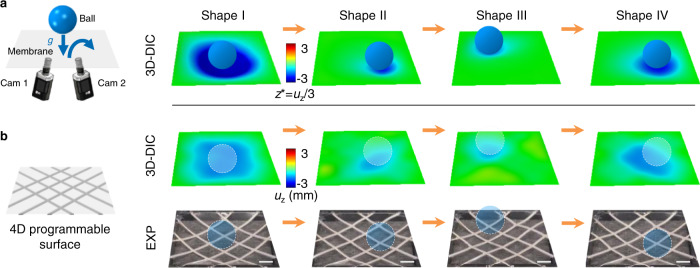
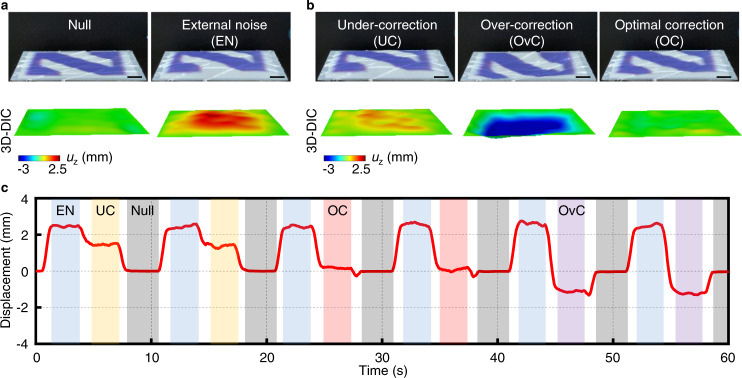
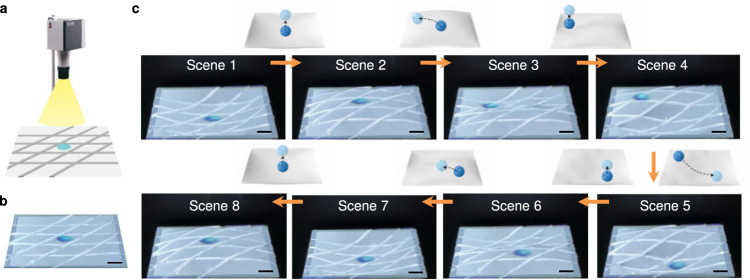
Low modulus materials that can shape-morph into different three-dimensional (3D) configurations in response to external stimuli have wide-ranging applications in flexible/stretchable electronics, surgical instruments, soft machines and soft robotics. This paper reports a shape-programmable system that exploits liquid metal microfluidic networks embedded in an elastomer matrix, with electromagnetic forms of actuation, to achieve a unique set of properties. Specifically, this materials structure is capable of fast, continuous morphing into a diverse set of continuous, complex 3D surfaces starting from a two-dimensional (2D) planar configuration, with fully reversible operation. Computational, multi-physics modeling methods and advanced 3D imaging techniques enable rapid, real-time transformations between target shapes. The liquid-solid phase transition of the liquid metal allows for shape fixation and reprogramming on demand. An unusual vibration insensitive, dynamic 3D display screen serves as an application example of this type of morphable surface.
© 2022. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- Chen T, Bilal OR, Lang R, Daraio C, Shea K. Autonomous deployment of a solar panel using elastic origami and distributed shape-memory-polymer actuators. Phys. Rev. Appl. 2019;11:064069. doi: 10.1103/PhysRevApplied.11.064069. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
