

Battery-free wireless imaging of underwater environments
- PMID: 36163186
- PMCID: PMC9512789
- DOI: 10.1038/s41467-022-33223-x
Battery-free wireless imaging of underwater environments
Erratum in
-
Publisher Correction: Battery-free wireless imaging of underwater environments.Nat Commun. 2022 Oct 12;13(1):6011. doi: 10.1038/s41467-022-33823-7. Nat Commun. 2022. PMID: 36224241 Free PMC article. No abstract available.
Abstract
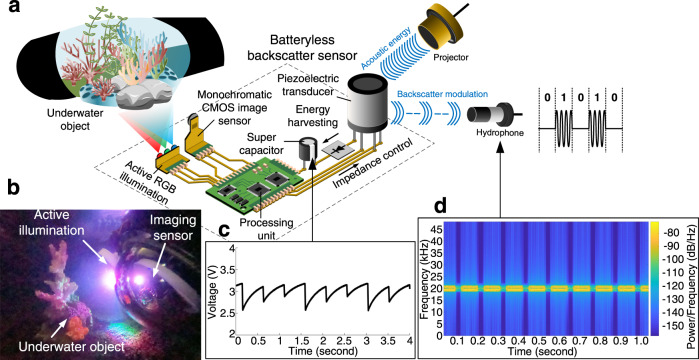
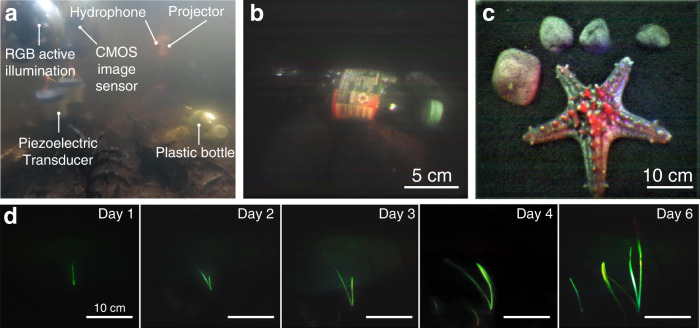
Imaging underwater environments is of great importance to marine sciences, sustainability, climatology, defense, robotics, geology, space exploration, and food security. Despite advances in underwater imaging, most of the ocean and marine organisms remain unobserved and undiscovered. Existing methods for underwater imaging are unsuitable for scalable, long-term, in situ observations because they require tethering for power and communication. Here we describe underwater backscatter imaging, a method for scalable, real-time wireless imaging of underwater environments using fully-submerged battery-free cameras. The cameras power up from harvested acoustic energy, capture color images using ultra-low-power active illumination and a monochrome image sensor, and communicate wirelessly at net-zero-power via acoustic backscatter. We demonstrate wireless battery-free imaging of animals, plants, pollutants, and localization tags in enclosed and open-water environments. The method's self-sustaining nature makes it desirable for massive, continuous, and long-term ocean deployments with many applications including marine life discovery, submarine surveillance, and underwater climate change monitoring.
© 2022. The Author(s).
Conflict of interest statement
F.A. is a founder of Cartesian Systems. R.G. is an employee at Apple. The remaining authors declare no competing interests.
Figures


References
-
- Nagelkerken I, Russell BD, Gillanders BM, Connell SD. Ocean acidification alters fish populations indirectly through habitat modification. Nat. Clim. Change. 2016;6:89–93. doi: 10.1038/nclimate2757. - DOI
Publication types
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
Other Literature Sources
