

Flexible ultrasound transceiver array for non-invasive surface-conformable imaging enabled by geometric phase correction
- PMID: 36171424
- PMCID: PMC9519534
- DOI: 10.1038/s41598-022-20721-7
Flexible ultrasound transceiver array for non-invasive surface-conformable imaging enabled by geometric phase correction
Abstract
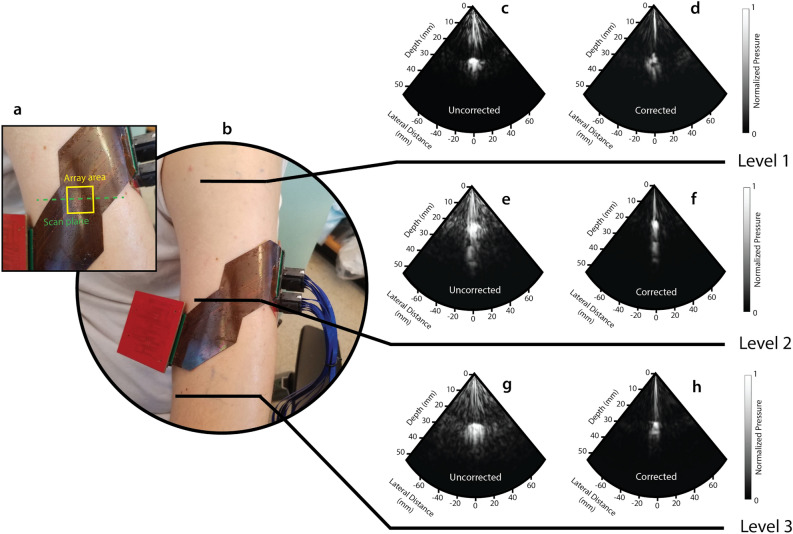
Ultrasound imaging provides the means for non-invasive real-time diagnostics of the internal structure of soft tissue in living organisms. However, the majority of commercially available ultrasonic transducers have rigid interfaces which cannot conform to highly-curved surfaces. These geometric limitations can introduce a signal-quenching air gap for certain topographies, rendering accurate imaging difficult or impractical. Here, we demonstrate a 256-element flexible two-dimensional (2D) ultrasound piezoelectric transducer array with geometric phase correction. We show surface-conformable real-time B-mode imaging, down to an extreme radius of curvature of 1.5 cm, while maintaining desirable performance metrics such as high signal-to-noise ratio (SNR) and minimal elemental cross-talk at all stages of bending. We benchmark the array capabilities by resolving reflectors buried at known locations in a medical-grade tissue phantom, and demonstrate how phase correction can improve image reconstruction on curved surfaces. With the current array design, we achieve an axial resolution of ≈ 2 mm at clinically-relevant depths in tissue, while operating the array at 1.4 MHz with a bandwidth of ≈ 41%. We use our prototype to image the surface of the human humerus at different positions along the arm, demonstrating proof-of-concept applicability for real-time diagnostics using phase-corrected flexible ultrasound probes.
© 2022. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures





References
-
- Lin M, Hu H, Zhou S, Xu S. Soft wearable devices for deep-tissue sensing. Nat. Rev. Mater. 2022;2022:1–20.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
Miscellaneous
