

Evaluation of Multi-layer Perceptron Neural Networks in Predicting Ankle Dorsiflexion in Healthy Adults using Movement-related Cortical Potentials for BCI-Neurofeedback Applications
- PMID: 36176143
- PMCID: PMC9639013
- DOI: 10.1109/ICORR55369.2022.9896584
Evaluation of Multi-layer Perceptron Neural Networks in Predicting Ankle Dorsiflexion in Healthy Adults using Movement-related Cortical Potentials for BCI-Neurofeedback Applications
Abstract
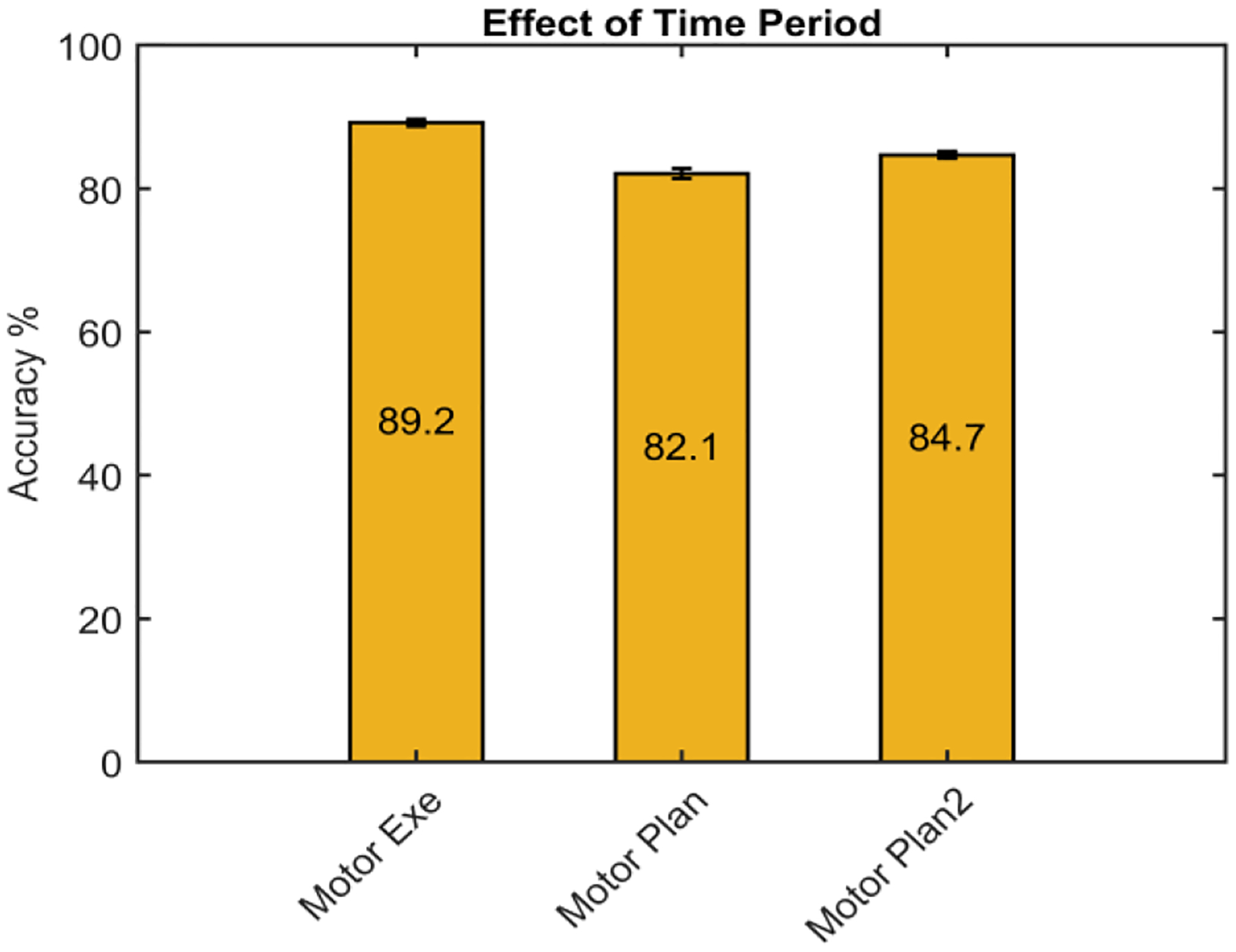
Brain computer interface (BCI) systems were initially developed to replace lost function; however, they are being increasingly utilized in rehabilitation to restore motor functioning after brain injury. In such BCI-mediated neurofeedback training (BCI-NFT), the brain-state associated with movement attempt or intention is used to activate an external device which assists the movement while providing sensory feedback to enhance neuroplasticity. A critical element in the success of BCI-NFT is accurate timing of the feedback within the active period of the brain state. The overarching goal of this work was to develop a reliable deep learning model that can predict motion before its onset, and thereby deliver the sensory stimuli in a timely manner for BCI-NFT applications. To this end, the main objective of the current study was to design and evaluate a Multi-layer Perceptron Neural Network (MLP-NN). Movement-related cortical potentials (MRCP) during planning and execution of ankle dorsiflexion was used to train the model to classify dorsiflexion planning vs. rest. The accuracy and reliability of the model was evaluated offline using data from eight healthy individuals (age: 26.3 ± 7.6 years). First, we evaluated three different epoching strategies for defining our 2 classes, to identify the one which best discriminated rest from dorsiflexion. The best model accuracy for predicting ankle dorsiflexion from EEG before movement execution was 84.7%. Second, the effect of various spatial filters on the model accuracy was evaluated, demonstrating that the spatial filtering had minimal effect on model accuracy and reliability.
Figures




References
-
- Hebb DO, The organization of behavior: a neuropsychological theory. Science editions, 1949.
-
- Mrachacz-Kersting N et al., “Towards a mechanistic approach for the development of non-invasive brain-computer interfaces for motor rehabilitation,” The Journal of physiology, vol. 599, no. 9, pp. 2361–2374, 2021. - PubMed
-
- Niazi IK, Mrachacz-Kersting N, Jiang N, Dremstrup K, and Farina D, “Peripheral electrical stimulation triggered by self-paced detection of motor intention enhances motor evoked potentials,” IEEE transactions on neural systems and rehabilitation engineering, vol. 20, no. 4, pp. 595–604, Jul 2012. - PubMed
