

Discrete element models for understanding the biomechanics of fossorial animals
- PMID: 36177130
- PMCID: PMC9481867
- DOI: 10.1002/ece3.9331
Discrete element models for understanding the biomechanics of fossorial animals
Erratum in
-
Corrigendum.Ecol Evol. 2022 Oct 3;12(10):e9394. doi: 10.1002/ece3.9394. eCollection 2022 Oct. Ecol Evol. 2022. PMID: 36225836 Free PMC article.
Abstract
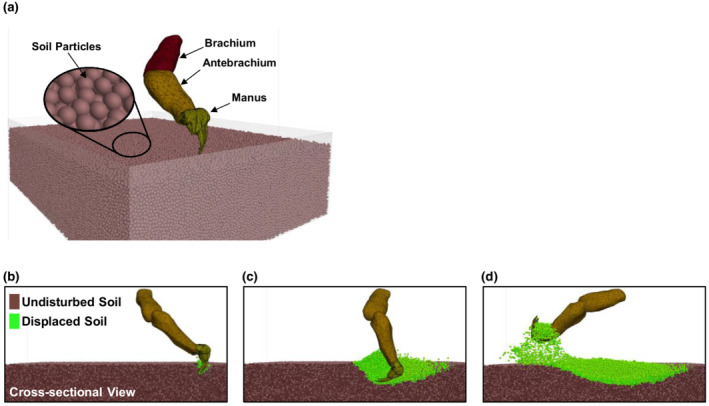
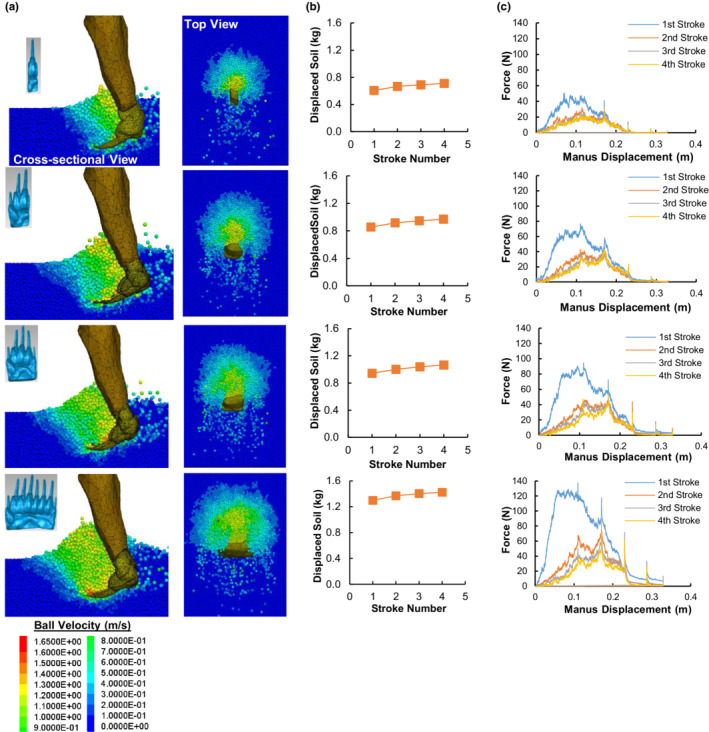
The morphological features of fossorial animals have continuously evolved in response to the demands of survival. However, existing methods for animal burrowing mechanics are not capable of addressing the large deformation of substrate. The discrete element method (DEM) is able to overcome this limitation. In this study, we used DEM to develop a general model to simulate the motion of an animal body part and its interaction with the substrate. The DEM also allowed us to easily change the forms of animal body parts to examine how those different forms affected the biomechanical functions. These capabilities of the DEM were presented through a case study of modeling the burrowing process of North American Badger. In the case study, the dynamics (forces, work, and soil displacements) of burrowing were predicted for different forms of badger claw and manus, using the model. Results showed that when extra digits are added to a manus, the work required for a badger to dig increases considerably, while the mass of soil dug only increases gradually. According to the proposed efficiency index (ratio of the amount of soil dug to the work required), the modern manus with 5 digits has indeed biomechanical advantage for their fossorial lifestyle, and the current claw curvature (25.3 mm in radius) is indeed optimal. The DEM is able to predict biomechanical relationships between functions and forms for any fossorial animals. Results can provide biomechanical evidences for explaining how the selective pressures for functions influence the morphological evolution in fossorial animals.
Keywords: badger; biomechanics; burrowing; discrete element method (DEM); soil.
© 2022 The Authors. Ecology and Evolution published by John Wiley & Sons Ltd.
Conflict of interest statement
The authors declare no conflict of interest.
Figures








Similar articles
-
Burrowing Constrains the Phenotypic Diversity of Fossorial Crayfish.Integr Comp Biol. 2024 Nov 21;64(5):1454-1466. doi: 10.1093/icb/icae067. Integr Comp Biol. 2024. PMID: 38862199
-
Balancing the competing requirements of saltatorial and fossorial specialisation: burrowing costs in the spinifex hopping mouse, Notomys alexis.J Exp Biol. 2006 Jun;209(Pt 11):2103-13. doi: 10.1242/jeb.02233. J Exp Biol. 2006. PMID: 16709912
-
DEM Study and Field Experiments on Coupling Bionic Subsoilers.Biomimetics (Basel). 2025 May 11;10(5):306. doi: 10.3390/biomimetics10050306. Biomimetics (Basel). 2025. PMID: 40422137 Free PMC article.
-
Biogeomorphological eco-evolutionary feedback between life and geomorphology: a theoretical framework using fossorial mammals.Naturwissenschaften. 2021 Oct 18;108(6):55. doi: 10.1007/s00114-021-01760-y. Naturwissenschaften. 2021. PMID: 34661745 Review.
-
Historical evolution and new trends for soil-intruder interaction modeling.Bioinspir Biomim. 2022 Nov 9;18(1). doi: 10.1088/1748-3190/ac99c4. Bioinspir Biomim. 2022. PMID: 36223782 Review.
Cited by
-
Corrigendum.Ecol Evol. 2022 Oct 3;12(10):e9394. doi: 10.1002/ece3.9394. eCollection 2022 Oct. Ecol Evol. 2022. PMID: 36225836 Free PMC article.
References
-
- Bishop, P. J. , Falisse, A. , De Groote, F. , & Hutchinson, J. R. (2021). Predictive simulations of musculoskeletal function and jumping performance in a generalized bird. Integrative Organismal Biology, 3(1), obab006. https://academic.oup.com/iob/article/doi/10.1093/iob/obab006/6226705 - DOI - PMC - PubMed
-
- Bishop, P. J. , Michel, K. B. , Falisse, A. , Cuff, A. R. , Allen, V. R. , De Groote, F. , & Hutchinson, J. R. (2021). Computational modelling of muscle fibre operating ranges in the hindlimb of a small ground bird (Eudromia elegans), with implications for modelling locomotion in extinct species. PLoS Computational Biology, 17(4), e1008843. 10.1371/journal.pcbi.1008843 - DOI - PMC - PubMed
-
- Brainerd, E. L. , Baier, D. B. , Gatesy, S. M. , Hedrick, T. L. , Metzger, K. A. , Gilbert, S. L. , & Crisco, J. J. (2010). X‐ray reconstruction of moving morphology (XROMM): Precision, accuracy and applications in comparative biomechanics research. Journal of Experimental Zoology Part A: Ecological Genetics and Physiology, 313(5), 262–279. https://onlinelibrary.wiley.com/doi/10.1002/jez.589 - DOI - PubMed
-
- Brown, A. C. , & Trueman, E. R. (1996). Burrowing behaviour and cost in the sandy‐beach oniscid isopod Tylos granulatus Krauss, 1843. Crustaceana, 69(4), 425–437. https://www.jstor.org/stable/20105217
-
- Campbel, G. S. (1985). Soil physics with basic transport models for soil‐plant system. In Pontificia Universidad Catolica del Peru (Vol. 14). Elsevier Science.
Associated data
LinkOut - more resources
Full Text Sources
