

Comparison of two cable configurations in 3D printed steerable instruments for minimally invasive surgery
- PMID: 36194613
- PMCID: PMC9531805
- DOI: 10.1371/journal.pone.0275535
Comparison of two cable configurations in 3D printed steerable instruments for minimally invasive surgery
Abstract
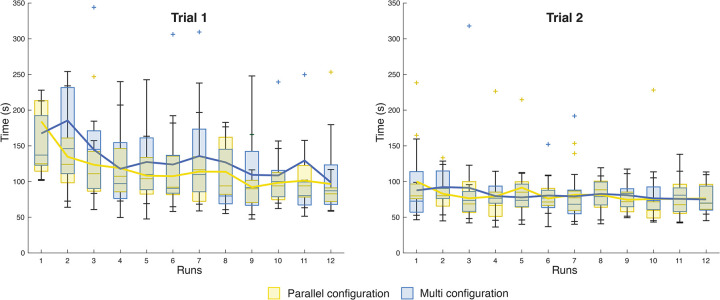
In laparoscopy, a small incision size improves the surgical outcome but increases at the same time the rigidity of the instrument, with consequent impairment of the surgeon's maneuverability. Such reduction introduces new challenges, such as the loss of wrist articulation or the impossibility of overcoming obstacles. A possible approach is using multi-steerable cable-driven instruments fully mechanical actuated, which allow great maneuverability while keeping the wound small. In this work, we compared the usability of the two most promising cable configurations in 3D printed multi-steerable instruments: a parallel configuration with all cables running straight from the steerable shaft to the handle; and a multi configuration with straight cables in combination with helical cables. Twelve participants were divided into two groups and asked to orient the instrument shaft and randomly hit six targets following the instructions in a laparoscopic simulator. Each participant carried out four trials (two trials for each instrument) with 12 runs per trial. The average task performance time showed a significant decrease over the first trial for both configurations. The decrease was 48% for the parallel and 41% for the multi configuration. Improvement of task performance times reached a plateau in the second trial with both instruments. The participants filled out a TLX questionnaire after each trial. The questionnaire showed a lower burden score for the parallel compared to multi configuration (23% VS 30%). Even though the task performance time for both configurations was comparable, a final questionnaire showed that 10 out of 12 participants preferred the parallel configuration due to a more intuitive hand movement and the possibility of individually orienting the distal end of the steerable shaft.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures











Similar articles
-
Steerable Surgical Instrument for Conventional and Single-Site Minimally Invasive Surgery.Surg Innov. 2022 Jun;29(3):449-458. doi: 10.1177/15533506211037091. Epub 2021 Aug 6. Surg Innov. 2022. PMID: 34358428
-
Exploring non-assembly 3D printing for novel compliant surgical devices.PLoS One. 2020 May 14;15(5):e0232952. doi: 10.1371/journal.pone.0232952. eCollection 2020. PLoS One. 2020. PMID: 32407397 Free PMC article.
-
A new modular mechanism that allows full detachability and cleaning of steerable laparoscopic instruments.Surg Endosc. 2019 Oct;33(10):3484-3493. doi: 10.1007/s00464-019-06849-0. Epub 2019 May 29. Surg Endosc. 2019. PMID: 31144119 Free PMC article.
-
[Minimally invasive ENT surgery. Progress due to modern technology].HNO. 1996 Jun;44(6):288-301. HNO. 1996. PMID: 8767124 Review. German.
-
Minimal invasive ear, nose and throat surgery--advances through modern technologies.Otolaryngol Pol. 1997;51(3):255-85. Otolaryngol Pol. 1997. PMID: 9398924 Review.
Cited by
-
Development and mechanical-functional validation of 3D-printed laparoscopic forceps.Rev Col Bras Cir. 2024 Jun 14;51:e20243619. doi: 10.1590/0100-6991e-20243619-en. eCollection 2024. Rev Col Bras Cir. 2024. PMID: 38896634 Free PMC article.
-
Towards Precision Ophthalmology: The Role of 3D Printing and Bioprinting in Oculoplastic Surgery, Retinal, Corneal, and Glaucoma Treatment.Biomimetics (Basel). 2024 Feb 27;9(3):145. doi: 10.3390/biomimetics9030145. Biomimetics (Basel). 2024. PMID: 38534830 Free PMC article. Review.
References
-
- Gallagher AG, McClure N, McGuigan J, Ritchie K, Sheehy NP. An ergonomic analysis of the fulcrum effect in the acquisition of endoscopic skills. Endoscopy. © Georg Thieme Verlag KG Stuttgart; · New York; 1998; 30: 617–20. - PubMed
-
- Surgical Intuitive. Move surgery forward. Again. da Vinci SP [Internet]. 2020. [cited 2020 Nov 25]. Available 2020 Nov 25, from https://www.intuitive.com/en-us/products-and-services/da-vinci/systems/sp.
-
- Schwarz Schurr K., MO GB. Robotics in endoscopic surgery: Can mechanical manipulators provide a more simple solution for the problem of limited degrees of freedom? Minim Invasive Ther Allied Technol. Taylor & Francis; 2001; 10: 289–93. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Miscellaneous
