

Emerging Magnetic Fabrication Technologies Provide Controllable Hierarchically-Structured Biomaterials and Stimulus Response for Biomedical Applications
- PMID: 36228106
- PMCID: PMC9731717
- DOI: 10.1002/advs.202202278
Emerging Magnetic Fabrication Technologies Provide Controllable Hierarchically-Structured Biomaterials and Stimulus Response for Biomedical Applications
Abstract
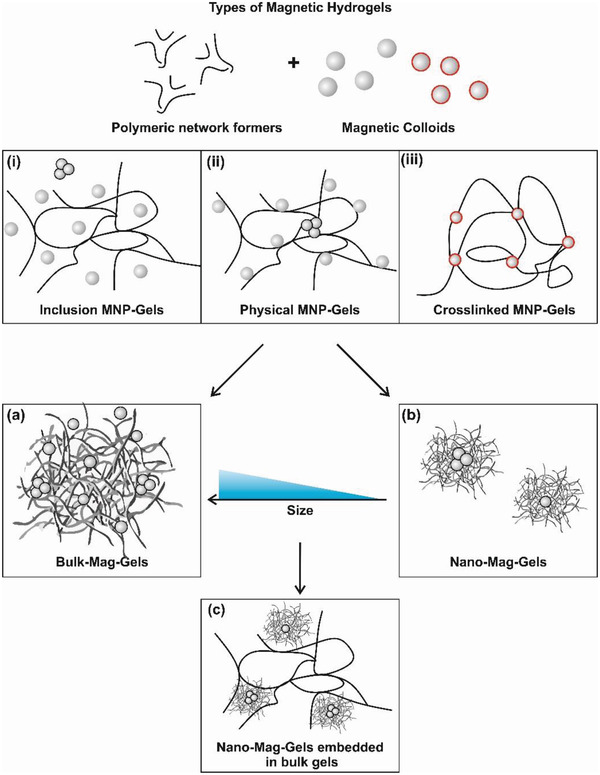
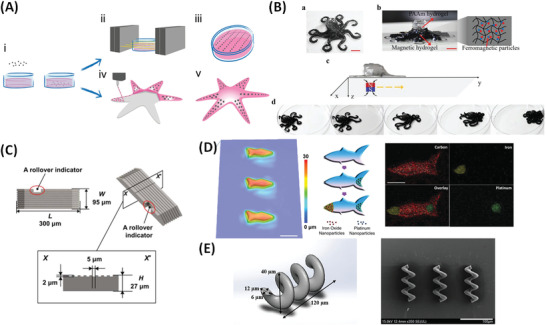
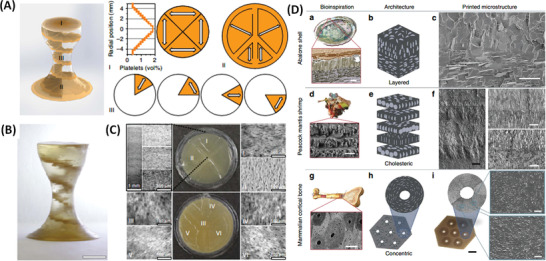
Multifunctional nanocomposites which exhibit well-defined physical properties and encode spatiotemporally-controlled responses are emerging as components for advanced responsive systems. For biomedical applications magnetic nanocomposite materials have attracted significant attention due to their ability to respond to spatially and temporally varying magnetic fields. The current state-of-the-art in development and fabrication of magnetic hydrogels toward biomedical applications is described. There is accelerating progress in the field due to advances in manufacturing capabilities. Three categories can be identified: i) Magnetic hydrogelation, DC magnetic fields are used during solidification/gelation for aligning particles; ii) additive manufacturing of magnetic materials, 3D printing technologies are used to develop spatially-encoded magnetic properties, and more recently; iii) magnetic additive manufacturing, magnetic responses are applied during the printing process to develop increasingly complex structural arrangement that may recapitulate anisotropic tissue structure and function. The magnetic responsiveness of conventionally and additively manufactured magnetic hydrogels are described along with recent advances in soft magnetic robotics, and the categorization is related to final architecture and emergent properties. Future challenges and opportunities, including the anticipated role of combinatorial approaches in developing 4D-responsive functional materials for tackling long-standing problems in biomedicine including production of 3D-specified responsive cell scaffolds are discussed.
Keywords: advanced manufacturing technologies; controlled release; magnetic hydrogels; magnetic hyperthermia; magnetic patterning; soft robotics.
© 2022 The Authors. Advanced Science published by Wiley-VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures












References
Publication types
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources