

Development of High-Fidelity Automotive LiDAR Sensor Model with Standardized Interfaces
- PMID: 36236655
- PMCID: PMC9572647
- DOI: 10.3390/s22197556
Development of High-Fidelity Automotive LiDAR Sensor Model with Standardized Interfaces
Abstract
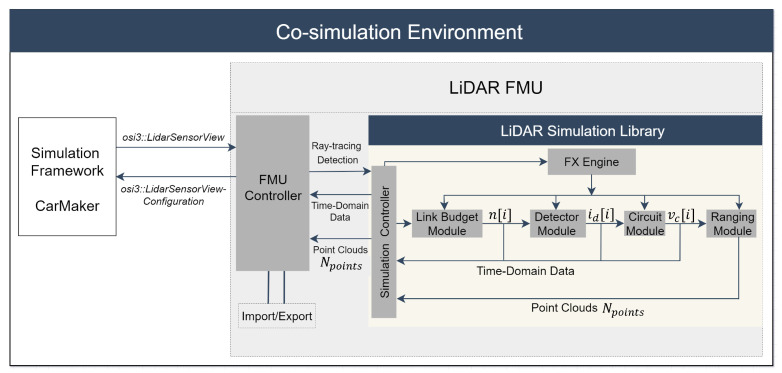
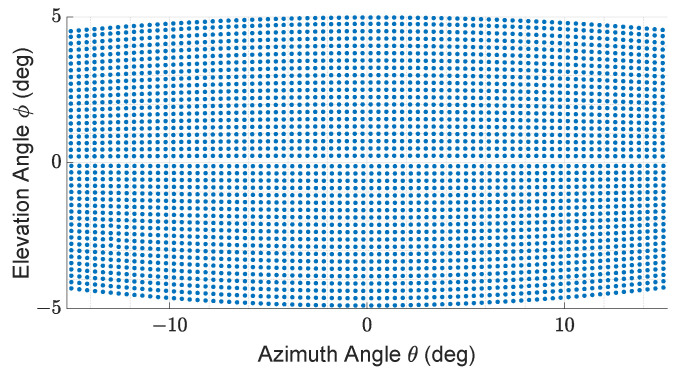
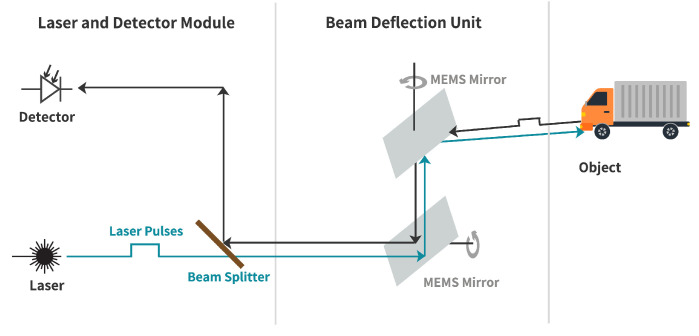
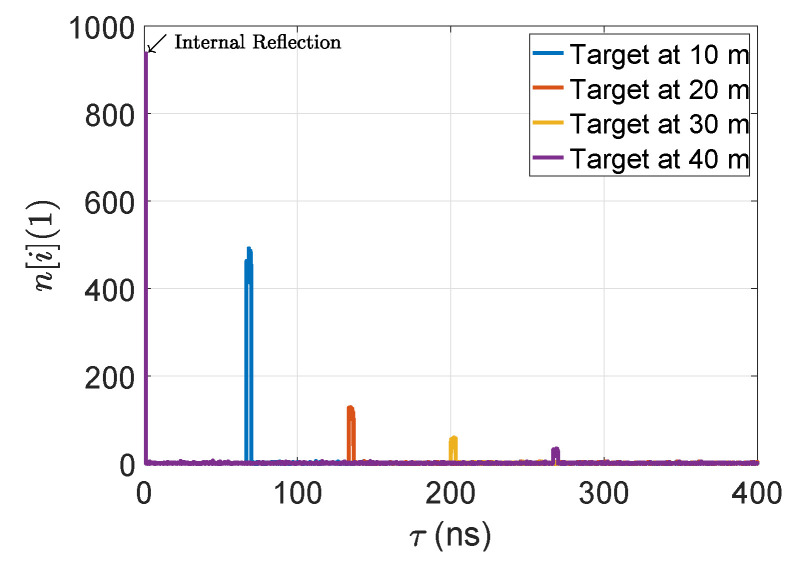
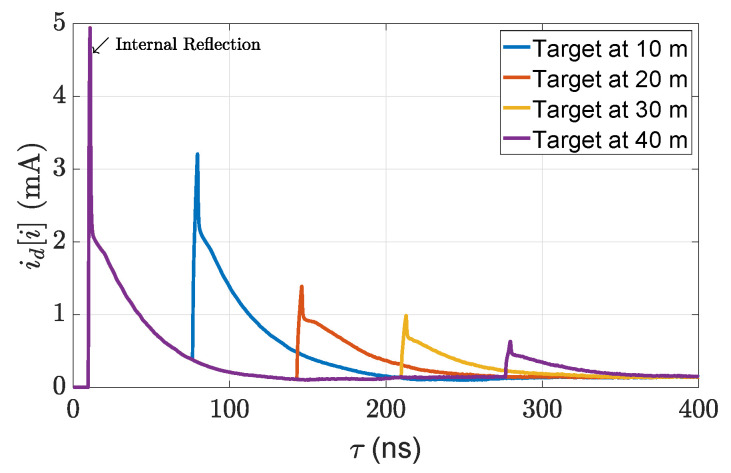
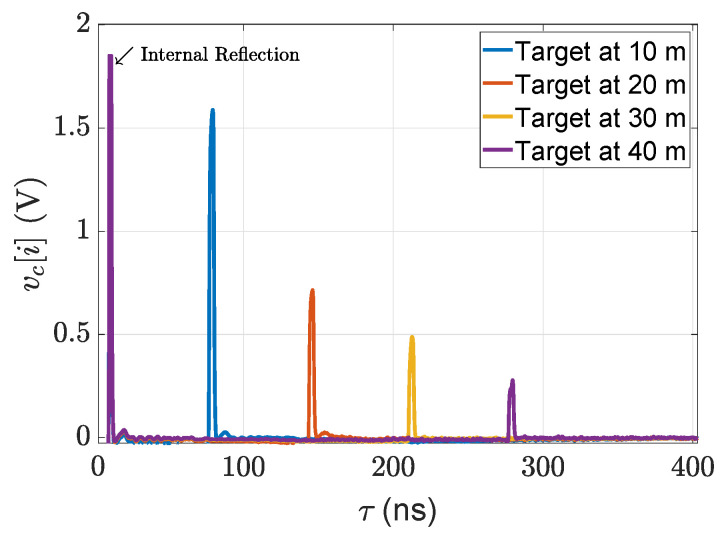
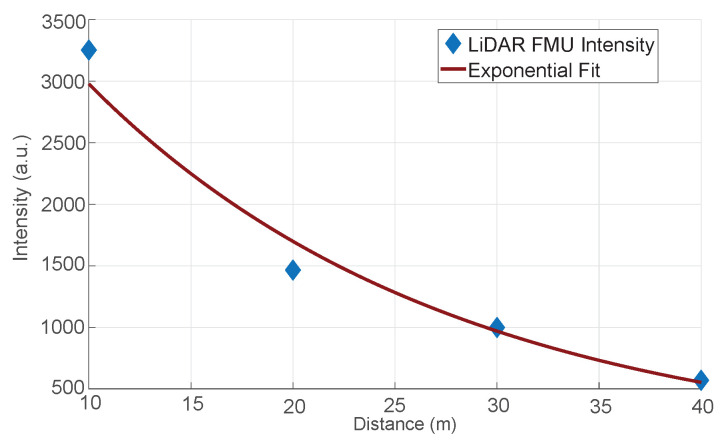
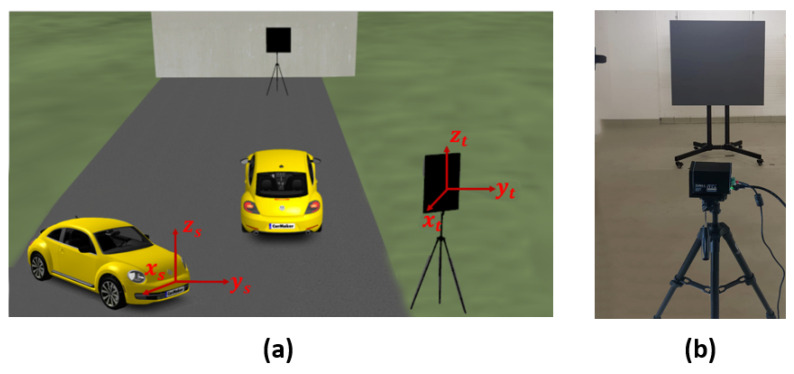
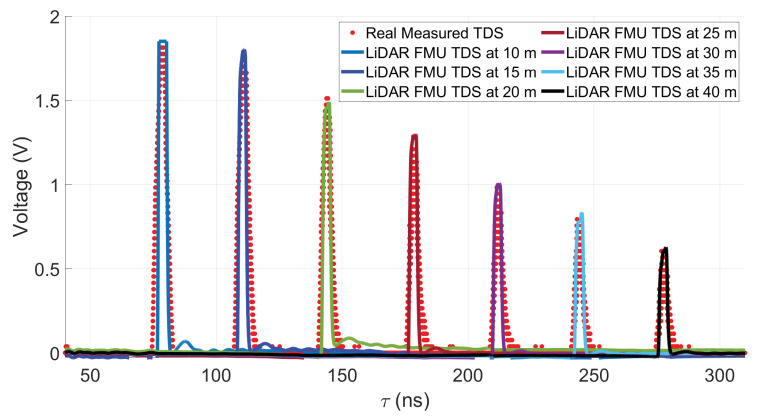
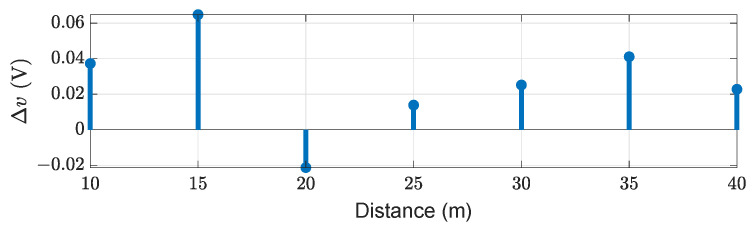
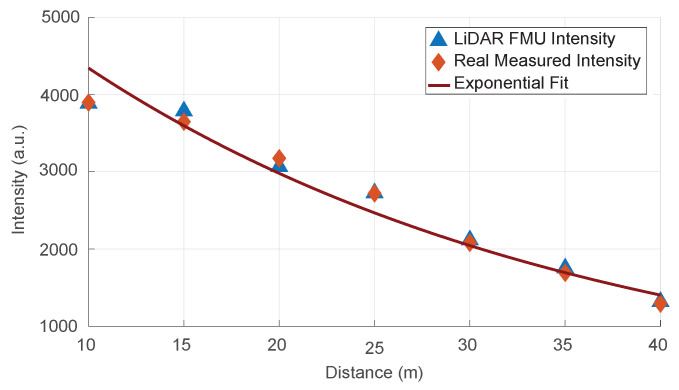
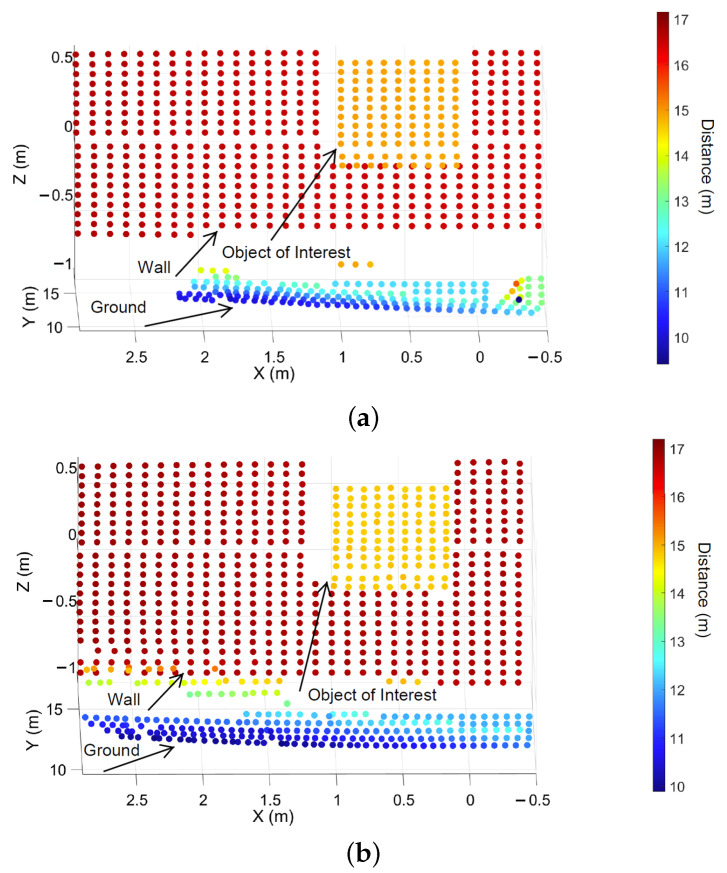
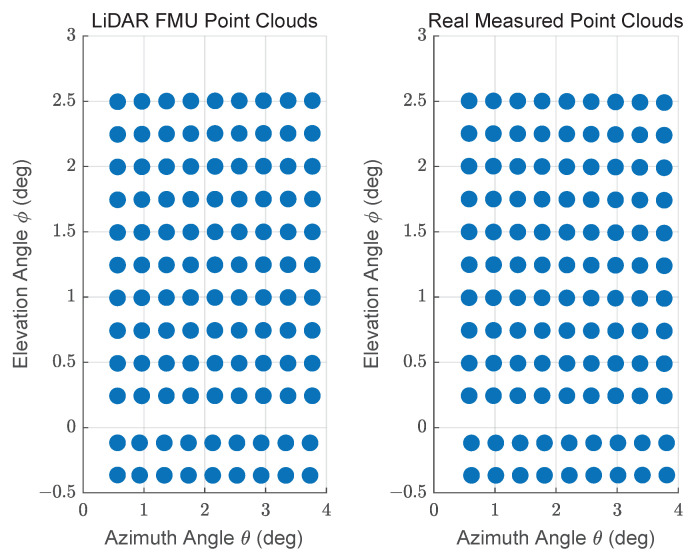
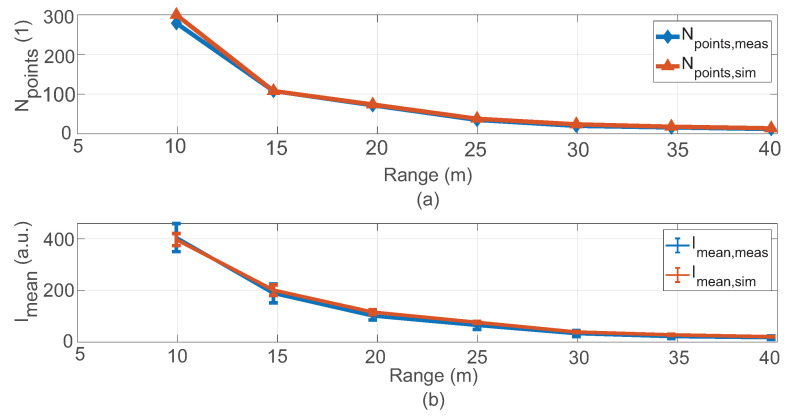
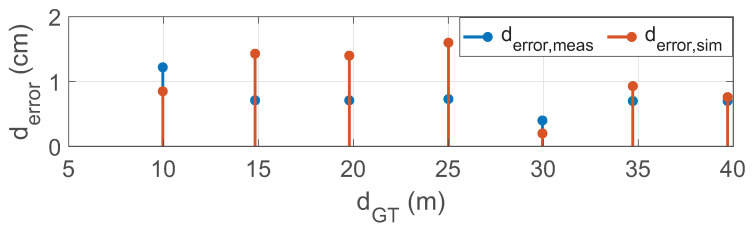
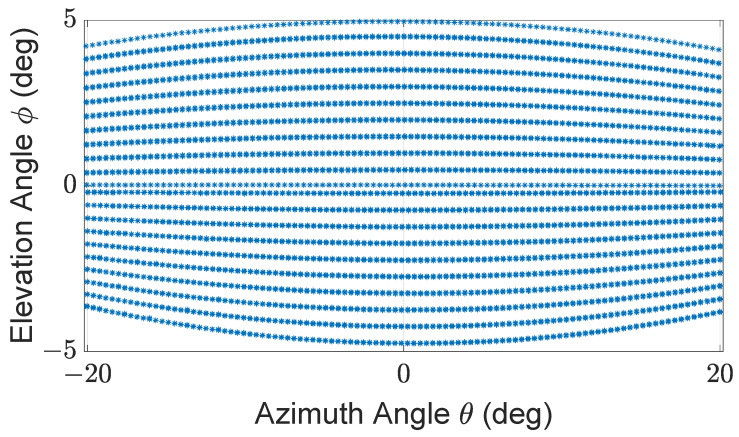
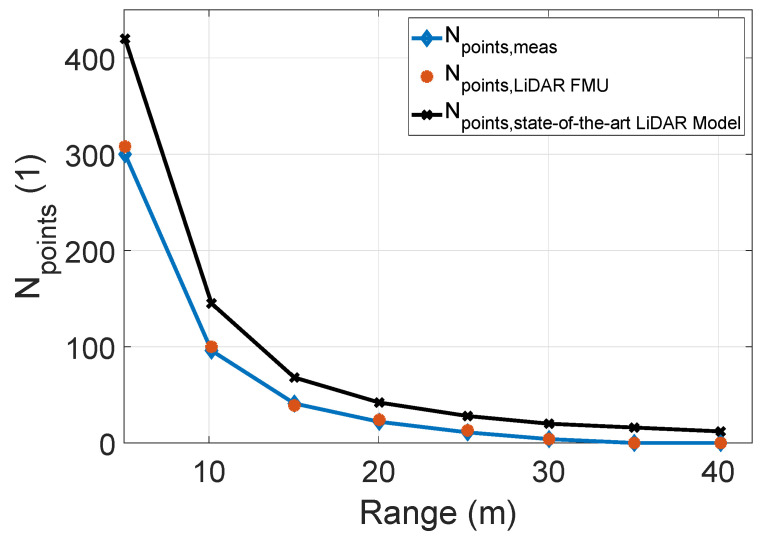
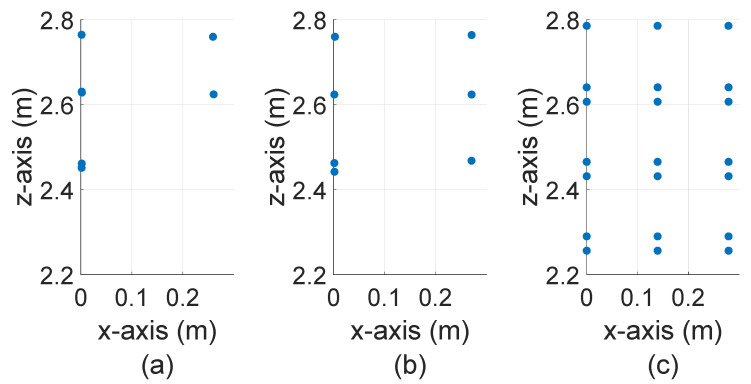
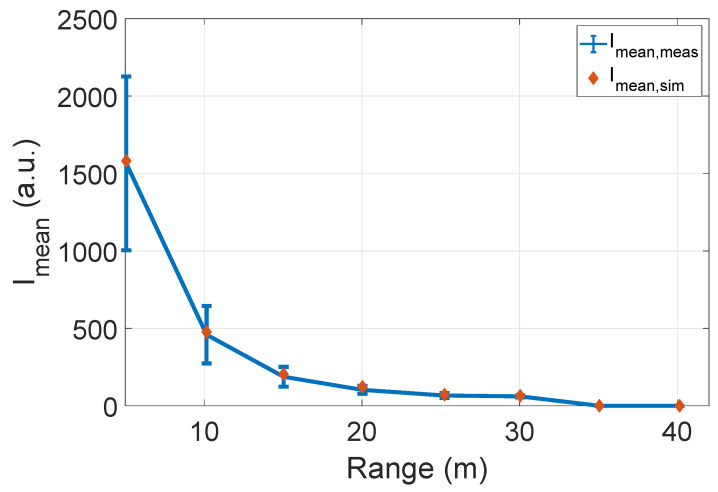
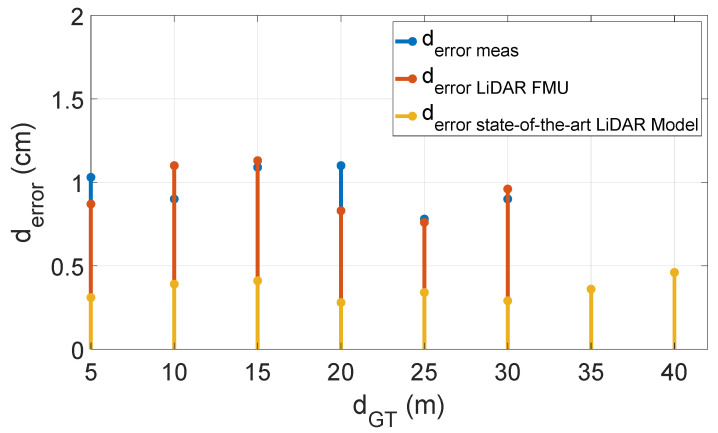
This work introduces a process to develop a tool-independent, high-fidelity, ray tracing-based light detection and ranging (LiDAR) model. This virtual LiDAR sensor includes accurate modeling of the scan pattern and a complete signal processing toolchain of a LiDAR sensor. It is developed as a functional mock-up unit (FMU) by using the standardized open simulation interface (OSI) 3.0.2, and functional mock-up interface (FMI) 2.0. Subsequently, it was integrated into two commercial software virtual environment frameworks to demonstrate its exchangeability. Furthermore, the accuracy of the LiDAR sensor model is validated by comparing the simulation and real measurement data on the time domain and on the point cloud level. The validation results show that the mean absolute percentage error (MAPE) of simulated and measured time domain signal amplitude is 1.7%. In addition, the MAPE of the number of points Npoints and mean intensity Imean values received from the virtual and real targets are 8.5% and 9.3%, respectively. To the author's knowledge, these are the smallest errors reported for the number of received points Npoints and mean intensity Imean values up until now. Moreover, the distance error derror is below the range accuracy of the actual LiDAR sensor, which is 2 cm for this use case. In addition, the proving ground measurement results are compared with the state-of-the-art LiDAR model provided by commercial software and the proposed LiDAR model to measure the presented model fidelity. The results show that the complete signal processing steps and imperfections of real LiDAR sensors need to be considered in the virtual LiDAR to obtain simulation results close to the actual sensor. Such considerable imperfections are optical losses, inherent detector effects, effects generated by the electrical amplification, and noise produced by the sunlight.
Keywords: CarMaker; advanced driver-assistance systems; automotive LiDAR sensor; co-simulation environment; functional mock-up interface; functional mock-up unit; open simulation interface; open standard; point clouds; proving ground; silicon photomultipliers detector; standardized interfaces; time domain signal.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
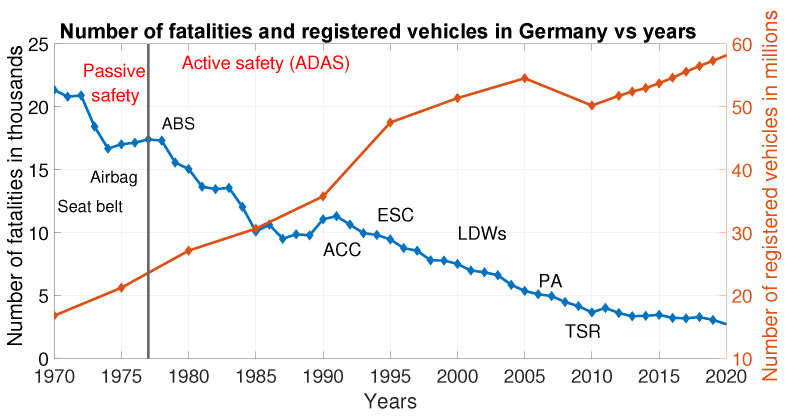
- KBA Bestand Nach Fahrzeugklassen und Aufbauarten. [(accessed on 15 April 2022)]. Available online: https://www.kba.de/DE/Statistik/Fahrzeuge/Bestand/FahrzeugklassenAufbaua....
-
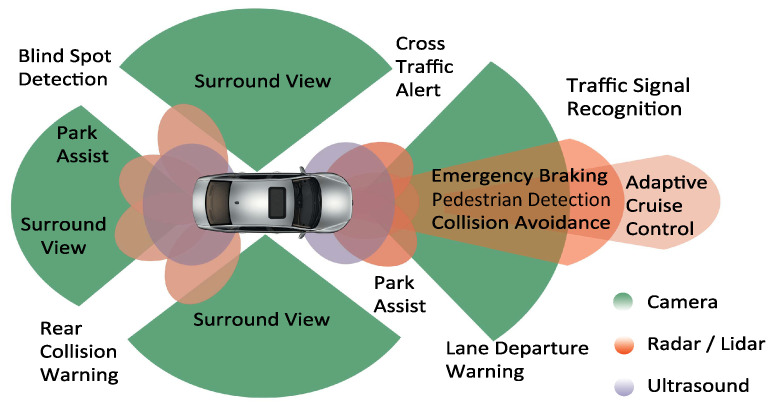
- Synopsys What is ADAS? [(accessed on 26 August 2021)]. Available online: https://www.synopsys.com/automotive/what-is-adas.html.
-
- Thomas W. Autonomous Driving. Springer; Berlin/Heidelberg, Germany: 2016. Safety benefits of automated vehicles: Extended findings from accident research for development, validation and testing; pp. 335–364.
-
- Kalra N., Paddock S.M. Driving to safety: How many miles of driving would it take to demonstrate autonomous vehicle reliability? Transp. Res. Part A Policy Pract. 2016;94:182–193. doi: 10.1016/j.tra.2016.09.010. - DOI
-
- Winner H., Hakuli S., Lotz F., Singer C. Handbook of Driver Assistance Systems. Springer International Publishing; Amsterdam, The Netherlands: 2016. pp. 405–430.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
