

Trunk Posture from Randomly Oriented Accelerometers
- PMID: 36236788
- PMCID: PMC9573549
- DOI: 10.3390/s22197690
Trunk Posture from Randomly Oriented Accelerometers
Abstract
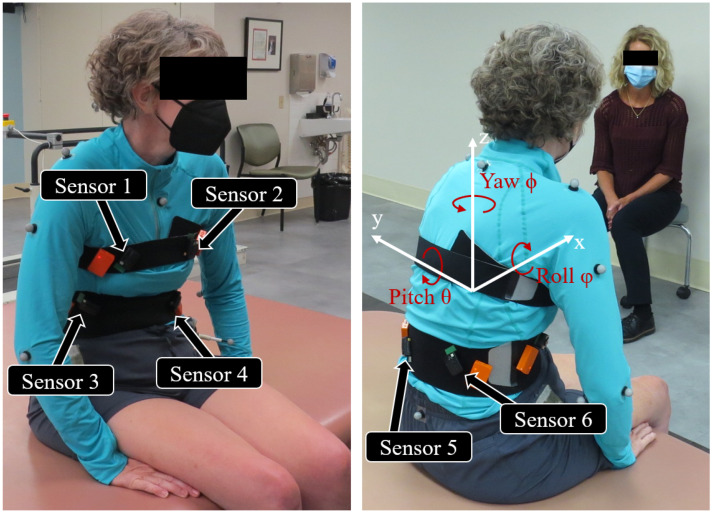
Feedback control of functional neuromuscular stimulation has the potential to improve daily function for individuals with spinal cord injuries (SCIs) by enhancing seated stability. Our fully implanted networked neuroprosthesis (NNP) can provide real-time feedback signals for controlling the trunk through accelerometers embedded in modules distributed throughout the trunk. Typically, inertial sensors are aligned with the relevant body segment. However, NNP implanted modules are placed according to surgical constraints and their precise locations and orientations are generally unknown. We have developed a method for calibrating multiple randomly oriented accelerometers and fusing their signals into a measure of trunk orientation. Six accelerometers were externally attached in random orientations to the trunks of six individuals with SCI. Calibration with an optical motion capture system resulted in RMSE below 5° and correlation coefficients above 0.97. Calibration with a handheld goniometer resulted in RMSE of 7° and correlation coefficients above 0.93. Our method can obtain trunk orientation from a network of sensors without a priori knowledge of their relationships to the body anatomical axes. The results of this study will be invaluable in the design of feedback control systems for stabilizing the trunk of individuals with SCI in combination with the NNP implanted technology.
Keywords: accelerometer; neuroprosthesis; sensor fusion; spinal cord injury.
Conflict of interest statement
The authors declare no conflict of interest.
Figures






References
-
- Thrasher T.A., Popovic M.R. Annales de Réadaptation et de Médecine Physique. Volume 51. Elsevier Masson; Paris, France: 2008. Functional electrical stimulation of walking: Function, exercise and rehabilitation; pp. 452–460. - PubMed
-
- Hasnan N., Ektas N., Tanhoffer A., Tanhoffer R., Fornusek C., Middleton J.W., Husain R., Davis G.M. Exercise responses during functional electrical stimulation cycling in individuals with spinal cord injury. Med. Sci. Sports Exerc. 2013;45:1131–1138. doi: 10.1249/MSS.0b013e3182805d5a. - DOI - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
