

Natural grasping movement recognition and force estimation using electromyography
- PMID: 36340765
- PMCID: PMC9630650
- DOI: 10.3389/fnins.2022.1020086
Natural grasping movement recognition and force estimation using electromyography
Abstract
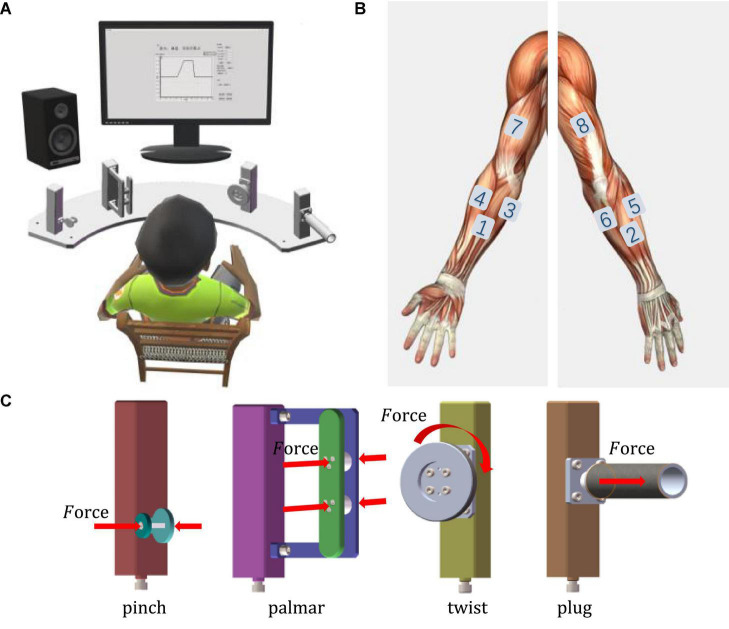
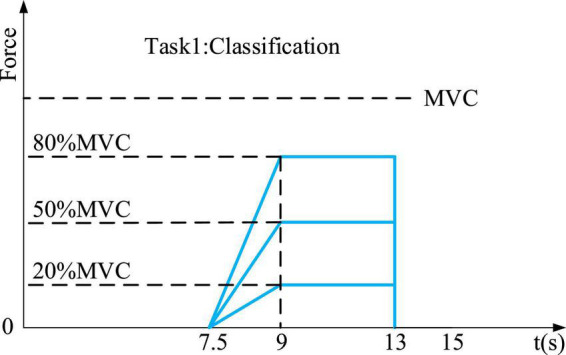
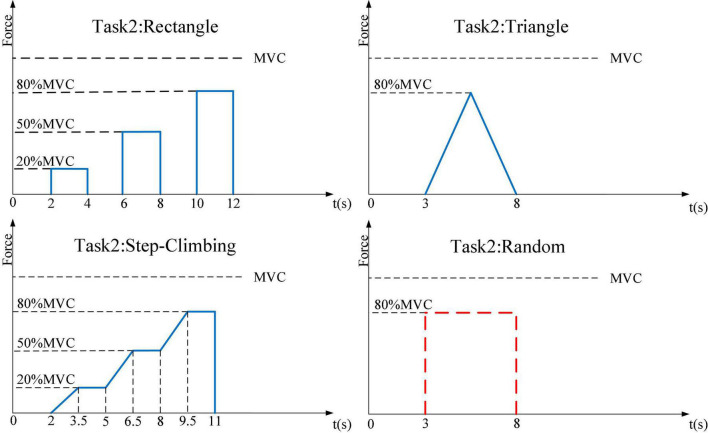
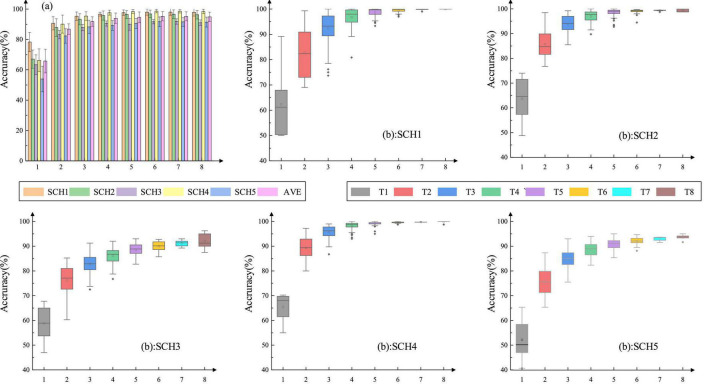
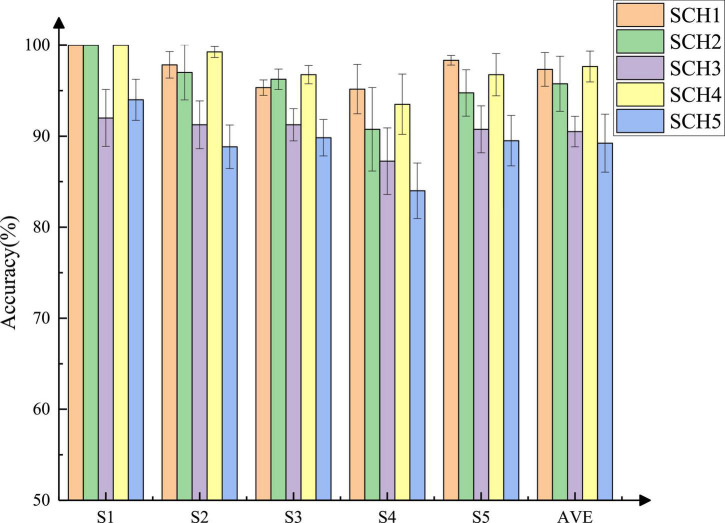
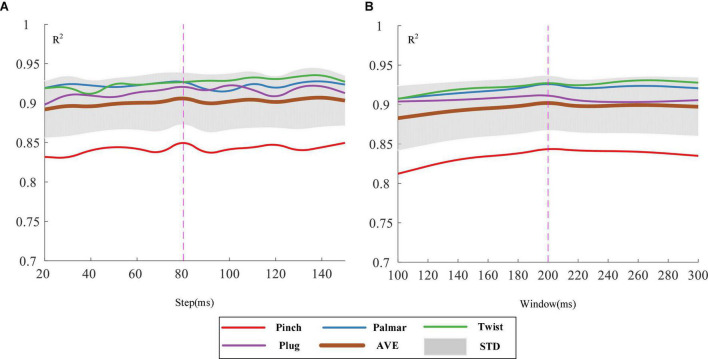
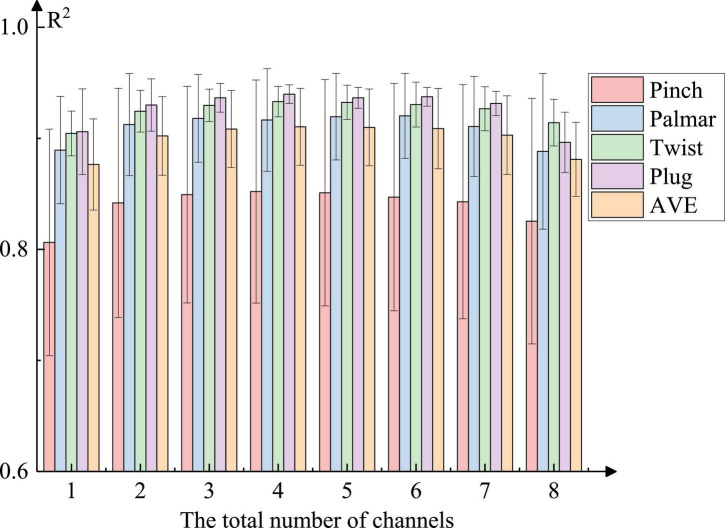
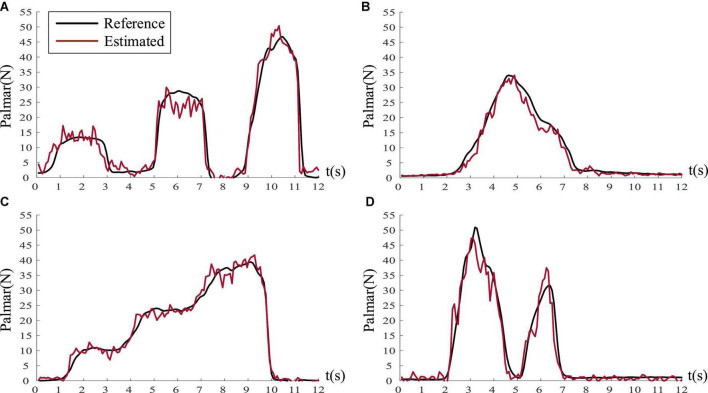
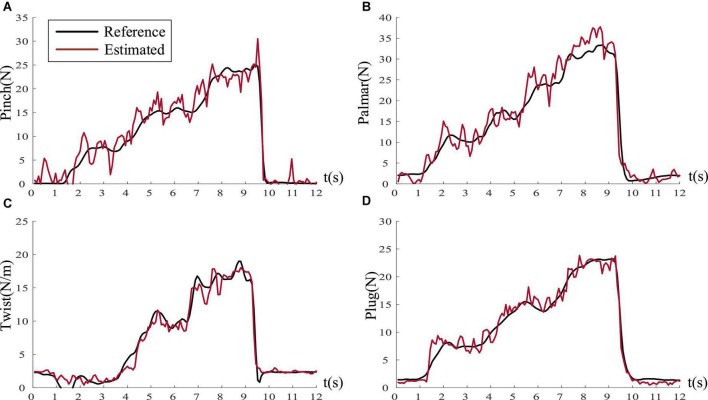
Electromyography (EMG) generated by human hand movements is usually used to decode different action types with high accuracy. However, the classifications of the gestures rarely consider the impact of force, and the estimation of the grasp force when performing natural grasping movements is so far overlooked. Decoding natural grasping movements and estimating the force generated by the associated movements can help patients to improve the accuracy of prosthesis control. This study mainly focused on two aspects: the classification of four natural grasping movements and the force estimation of these actions. For this purpose, we designed an experimental platform where subjects could perform four common natural grasping movements in daily life, including pinch, palmar, twist, and plug grasp, to complete target profiles. On the one hand, the results showed that, for natural grasping movements with different levels of force (three levels at 20, 50, and 80%), the average accuracy could reach from 91.43 to 97.33% under five classification schemes. On the other hand, the feasibility of force estimation for natural grasping movements was demonstrated. Furthermore, in the process of force estimation, we confirmed that the regression performance about plug grasp was the best, and the average R 2 could reach 0.9082. Besides, we found that the regression results were affected by the speed of force application. These findings contribute to the natural control of myoelectric prosthesis and the EMG-based rehabilitation training system, improving the user's experience and acceptance.
Keywords: action decoding; electromyography (EMG); force estimation; grasping force; natural grasping movements.
Copyright © 2022 Xu, Zhang, Yang, Liu, Hu, Li and Song.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures
Similar articles
-
Decoding Different Reach-and-Grasp Movements Using Noninvasive Electroencephalogram.Front Neurosci. 2021 Sep 28;15:684547. doi: 10.3389/fnins.2021.684547. eCollection 2021. Front Neurosci. 2021. PMID: 34650398 Free PMC article.
-
Decoding the grasping intention from electromyography during reaching motions.J Neuroeng Rehabil. 2018 Jun 26;15(1):57. doi: 10.1186/s12984-018-0396-5. J Neuroeng Rehabil. 2018. PMID: 29940991 Free PMC article.
-
EMG Biofeedback for online predictive control of grasping force in a myoelectric prosthesis.J Neuroeng Rehabil. 2015 Jun 19;12:55. doi: 10.1186/s12984-015-0047-z. J Neuroeng Rehabil. 2015. PMID: 26088323 Free PMC article.
-
Realizing Efficient EMG-Based Prosthetic Control Strategy.Adv Exp Med Biol. 2019;1101:149-166. doi: 10.1007/978-981-13-2050-7_6. Adv Exp Med Biol. 2019. PMID: 31729675 Review.
-
User's guide to sample size estimation in diagnostic accuracy studies.Turk J Emerg Med. 2022 Sep 30;22(4):177-185. doi: 10.4103/2452-2473.357348. eCollection 2022 Oct-Dec. Turk J Emerg Med. 2022. PMID: 36353389 Free PMC article. Review.
Cited by
-
A Surface Electromyography (sEMG) System Applied for Grip Force Monitoring.Sensors (Basel). 2024 Jun 13;24(12):3818. doi: 10.3390/s24123818. Sensors (Basel). 2024. PMID: 38931601 Free PMC article.
References
-
- Bog M. F., Erkocevic E., Niemeier M. J., Mathiesen J. R., Smidstrup A., Kamavuako E. N. (2011). “Investigation of the linear relationship between grasping force and features of intramuscular EMG,” in Proceedings of the 15th Nordic-Baltic conference on biomedical engineering and medical physics (NBC 2011), Aalborg. 10.1016/j.jneumeth.2009.09.006 - DOI
-
- Castellini C., Smagt P. V. D., Sandini G., Hirzinger G. (2008). “Surface EMG for force control of mechanical hands,” in Proceedings of the 2008 IEEE international conference on robotics and automation, Pasadena, CA, 725–730.
LinkOut - more resources
Full Text Sources