

Photothermal modulated dielectric elastomer actuator for resilient soft robots
- PMID: 36351948
- PMCID: PMC9646827
- DOI: 10.1038/s41467-022-34301-w
Photothermal modulated dielectric elastomer actuator for resilient soft robots
Abstract
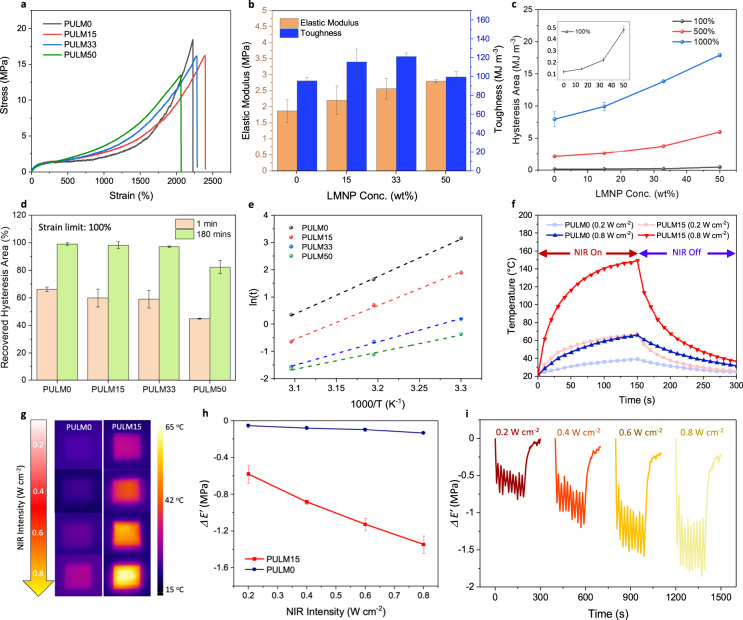
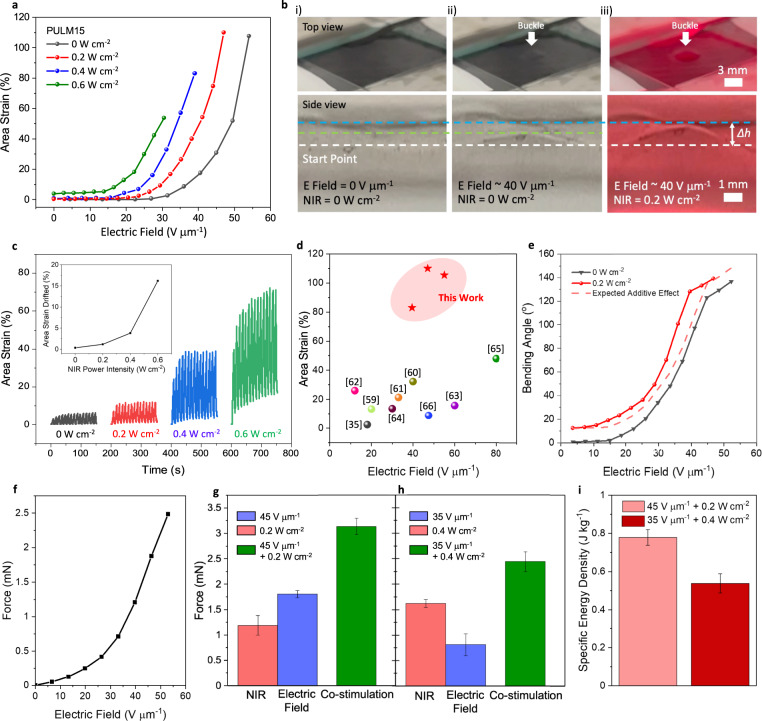
Soft robots need to be resilient to extend their operation under unpredictable environments. While utilizing elastomers that are tough and healable is promising to achieve this, mechanical enhancements often lead to higher stiffness that deteriorates actuation strains. This work introduces liquid metal nanoparticles into carboxyl polyurethane elastomer to sensitize a dielectric elastomer actuator (DEA) with responsiveness to electric fields and NIR light. The nanocomposite can be healed under NIR illumination to retain high toughness (55 MJ m-3) and can be recycled at lower temperatures and shorter durations due to nanoparticle-elastomer interactions that minimize energy barriers. During co-stimulation, photothermal effects modulate the elastomer moduli to lower driving electric fields of DEAs. Bilayer configurations display synergistic actuation under co-stimulation to improve energy densities, and enable a DEA crawler to achieve longer strides. This work paves the way for a generation of soft robots that achieves both resilience and high actuation performance.
© 2022. The Author(s).
Conflict of interest statement
The authors declare no competing interests
Figures




References
-
- Kim S, Laschi C, Trimmer B. Soft robotics: a bioinspired evolution in robotics. Trends Biotechnol. 2013;31:287–294. - PubMed
-
- Rich SI, Wood RJ, Majidi C. Untethered soft robotics. Nat. Electron. 2018;1:102–112.
-
- Bilodeau RA, Kramer RK. Self-healing and damage resilience for soft robotics: a review. Front. Robot. AI. 2017;4:48.
-
- Terryn S, et al. A review on self-healing polymers for soft robotics. Mater. Today. 2021;47:187–205.
-
- Tan, M. W. M., Thangavel, G. & Lee, P. S. Rugged soft robots using tough, stretchable, and self‐healable adhesive elastomers. Adv Functional Mater.31, 2103097 (2021).
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
