

Off-Road Detection Analysis for Autonomous Ground Vehicles: A Review
- PMID: 36366160
- PMCID: PMC9657584
- DOI: 10.3390/s22218463
Off-Road Detection Analysis for Autonomous Ground Vehicles: A Review
Abstract
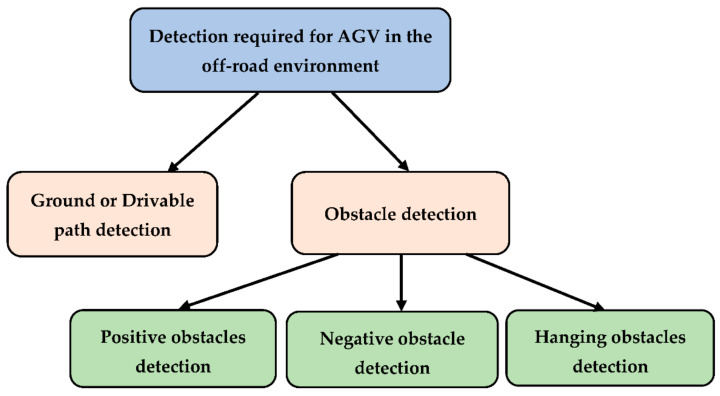
When it comes to some essential abilities of autonomous ground vehicles (AGV), detection is one of them. In order to safely navigate through any known or unknown environment, AGV must be able to detect important elements on the path. Detection is applicable both on-road and off-road, but they are much different in each environment. The key elements of any environment that AGV must identify are the drivable pathway and whether there are any obstacles around it. Many works have been published focusing on different detection components in various ways. In this paper, a survey of the most recent advancements in AGV detection methods that are intended specifically for the off-road environment has been presented. For this, we divided the literature into three major groups: drivable ground and positive and negative obstacles. Each detection portion has been further divided into multiple categories based on the technology used, for example, single sensor-based, multiple sensor-based, and how the data has been analyzed. Furthermore, it has added critical findings in detection technology, challenges associated with detection and off-road environment, and possible future directions. Authors believe this work will help the reader in finding literature who are doing similar works.
Keywords: autonomous ground vehicles; drivable ground; negative obstacles; off-road environment; positive obstacles.
Conflict of interest statement
The authors declare no conflict of interest.
Figures



References
-
- Gomi T., Ide K.-I., Matsuo H. The development of a fully autonomous ground vehicle (FAGV); Proceedings of the Intelligent Vehicles’94 Symposium; Paris, France. 24–26 October 1994; pp. 62–67. - DOI
-
- Gage D.W. Ugv history 101: A brief history of unmanned ground vehicle (ugv) development efforts. DTIC Document. Tech. Rep. 1995;13:1–9.
-
- Thakkar J.J. Structural Equation Modelling. Springer; Berlin/Heidelberg, Germany: 2020. Applications of structural equation modelling with AMOS 21, IBM SPSS; pp. 35–89.
-
- Shang E., An X., Li J., He H. A novel setup method of 3D LIDAR for negative obstacle detection in field environment; Proceedings of the 2014 IEEE 17th International Conference on Intelligent Transportation Systems (ITSC 2014); Qingdao, China. 8–11 October 2014; pp. 1436–1441.
-
- Luettel T., Himmelsbach M., Wuensche H.-J. Autonomous Ground Vehicles—Concepts and a Path to the Future. Proc. IEEE. 2012;100:1831–1839. doi: 10.1109/JPROC.2012.2189803. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
