

Grasping follows Weber's law: How to use response variability as a proxy for JND
- PMID: 36374493
- PMCID: PMC9669808
- DOI: 10.1167/jov.22.12.13
Grasping follows Weber's law: How to use response variability as a proxy for JND
Abstract
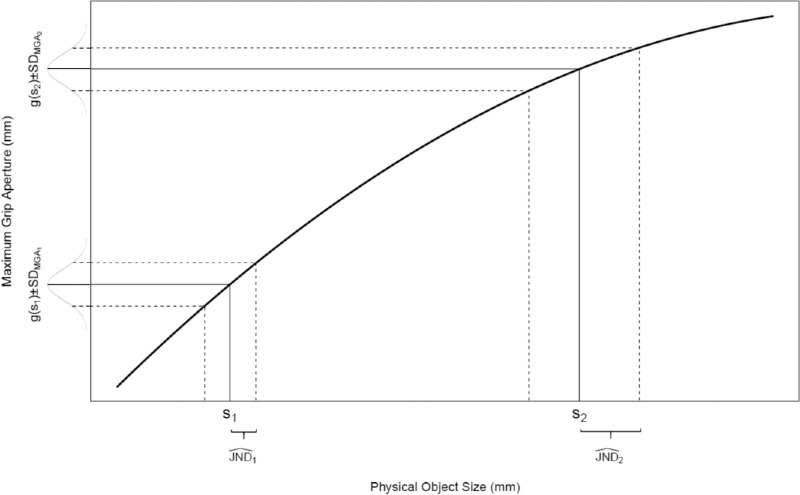
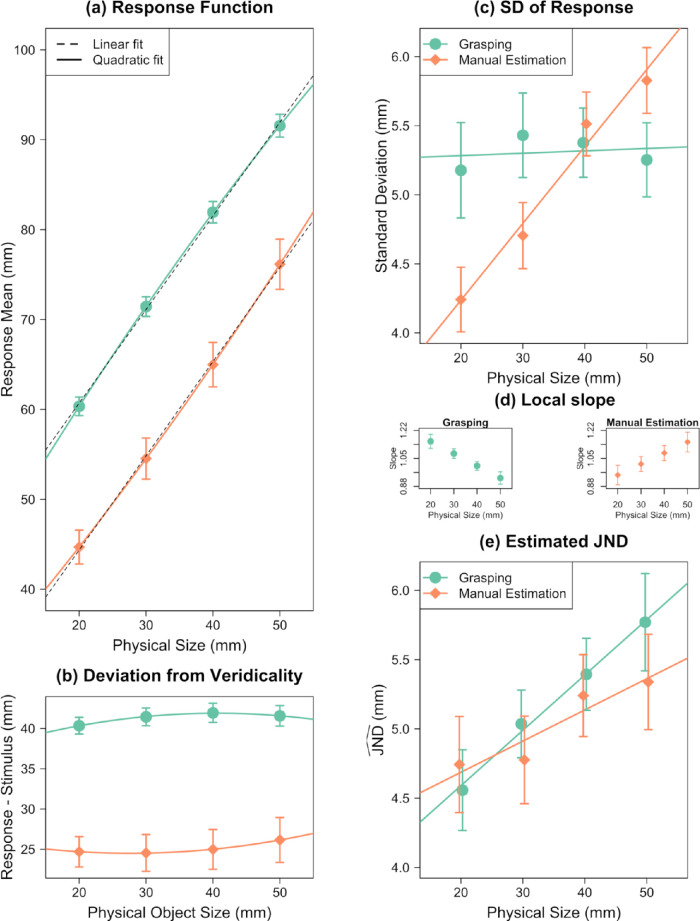
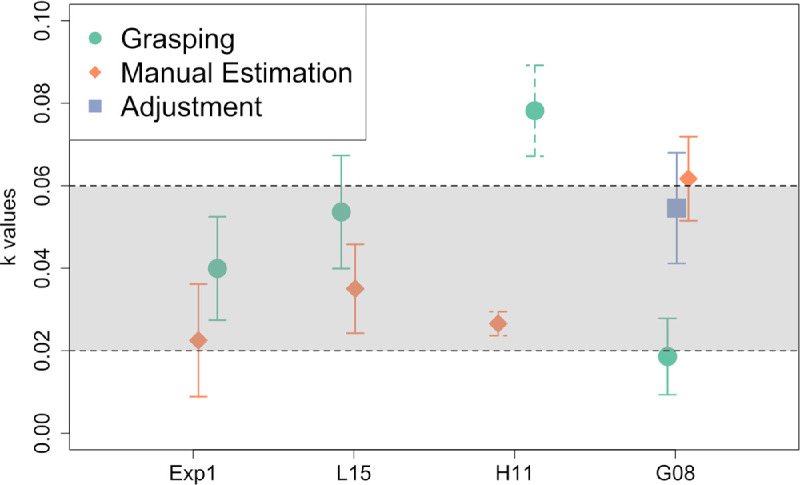
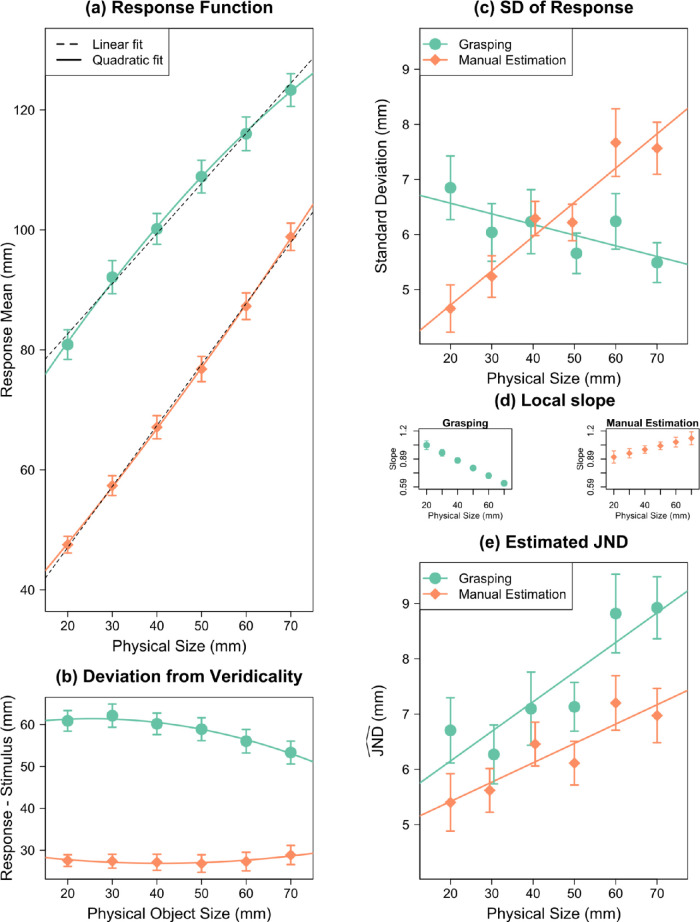
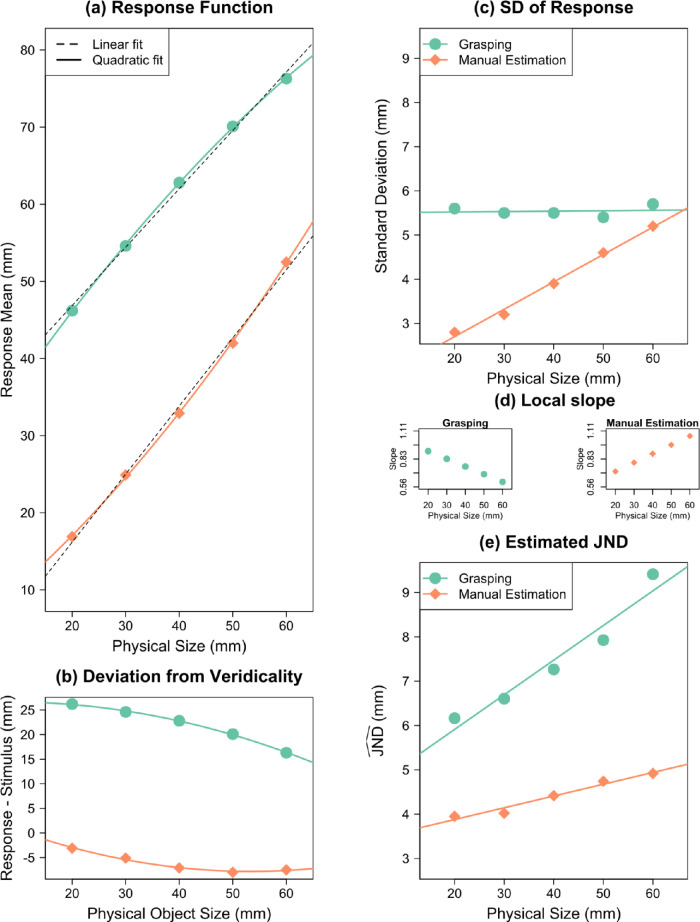
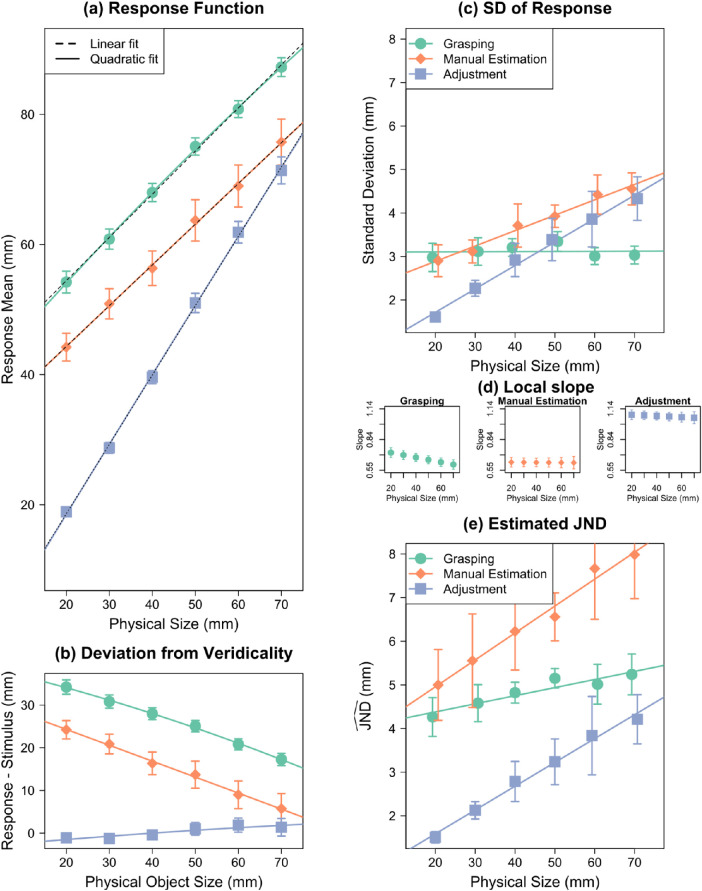
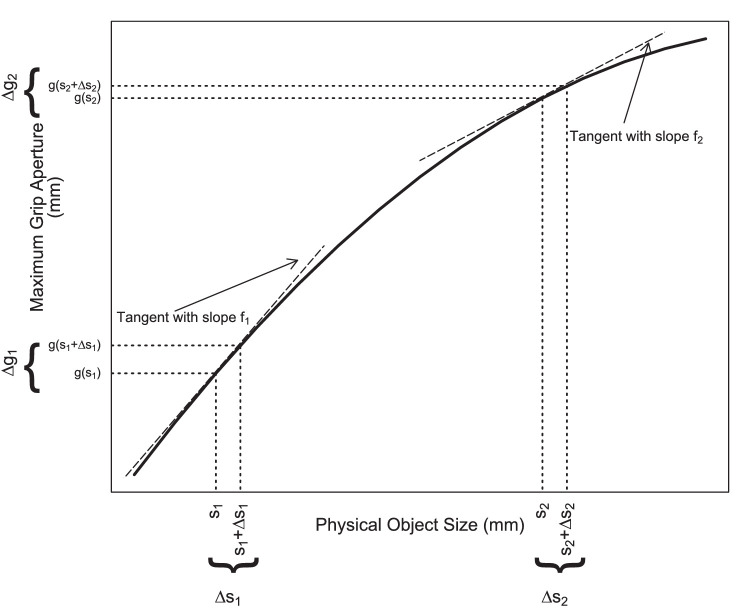
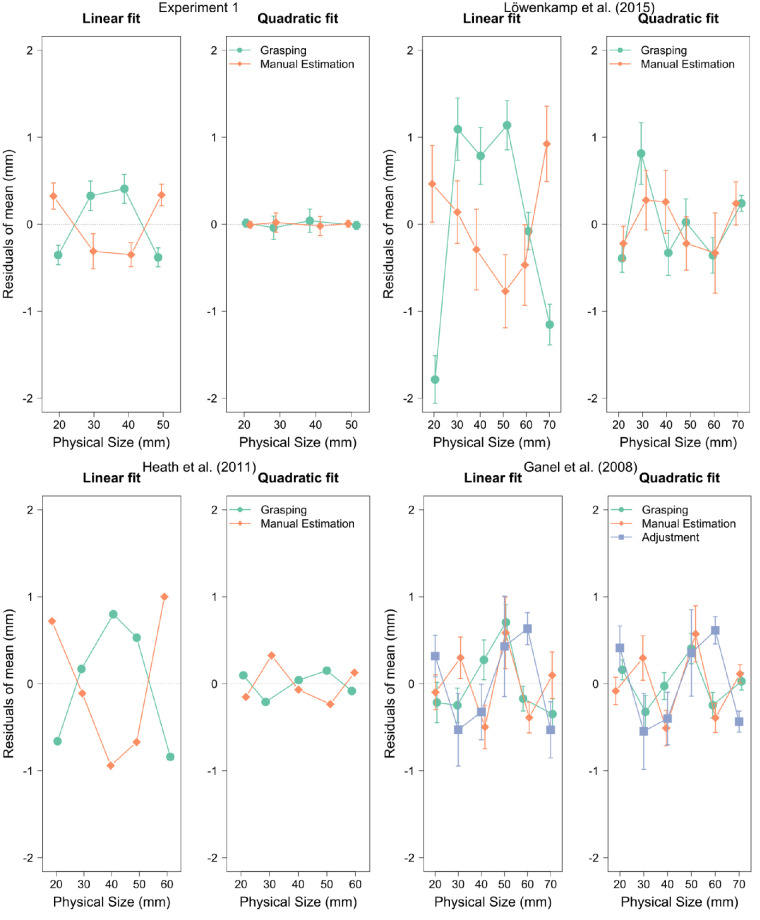
Weber's law is a fundamental psychophysical principle. It states that the just noticeable difference (JND) between stimuli increases with stimulus magnitude; consequently, larger stimuli should be estimated with larger variability. However, visually guided grasping seems to violate this expectation: When repeatedly grasping large objects, the variability is similar to that when grasping small objects. Based on this result, it was often concluded that grasping violated Weber's law. This astonishing finding generated a flurry of research, with contradictory results and potentially far-reaching implications for theorizing about the functional architecture of the brain. We show that previous studies ignored nonlinearities in the scaling of the grasping response. These nonlinearities result from, for example, the finger span being limited such that the opening of the fingers reaches a ceiling for large objects. We describe how to mathematically take these nonlinearities into account and apply this approach to our own data, as well as to the data of three influential studies on this topic. In all four datasets, we found that-when appropriately estimated-JNDs increase with object size, as expected by Weber's law. We conclude that grasping obeys Weber's law, as do essentially all sensory dimensions.
Figures
References
-
- Baird, J. C., & Noma, E. (1978). Fundamentals of scaling and psychophysics. New York: John Wiley & Sons.
-
- Brainard, D. H. (1997). The Psychophysics Toolbox. Spatial Vision, 10(4), 433–436. - PubMed
-
- Brown, R., Galanter, E., Hess, E. H., & Mandler, G. (1962). New directions in psychology . New York: Holt, Rinehart, & Winston.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
