

Bio-inspired design of a self-aligning, lightweight, and highly-compliant cable-driven knee exoskeleton
- PMID: 36419645
- PMCID: PMC9677347
- DOI: 10.3389/fnhum.2022.1018160
Bio-inspired design of a self-aligning, lightweight, and highly-compliant cable-driven knee exoskeleton
Abstract
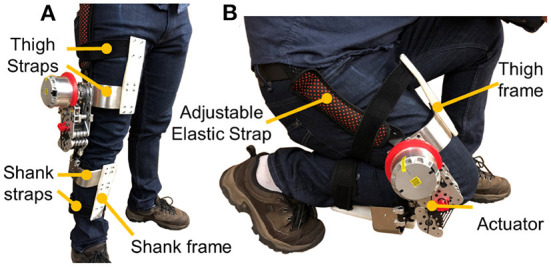
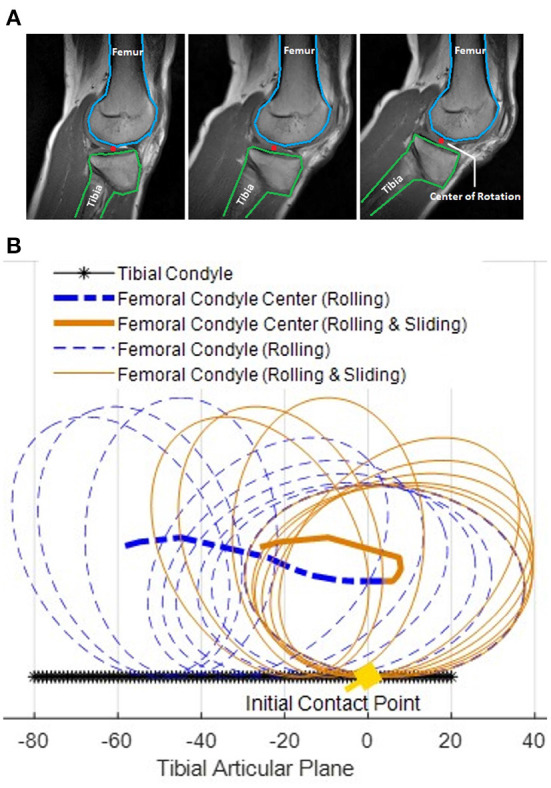
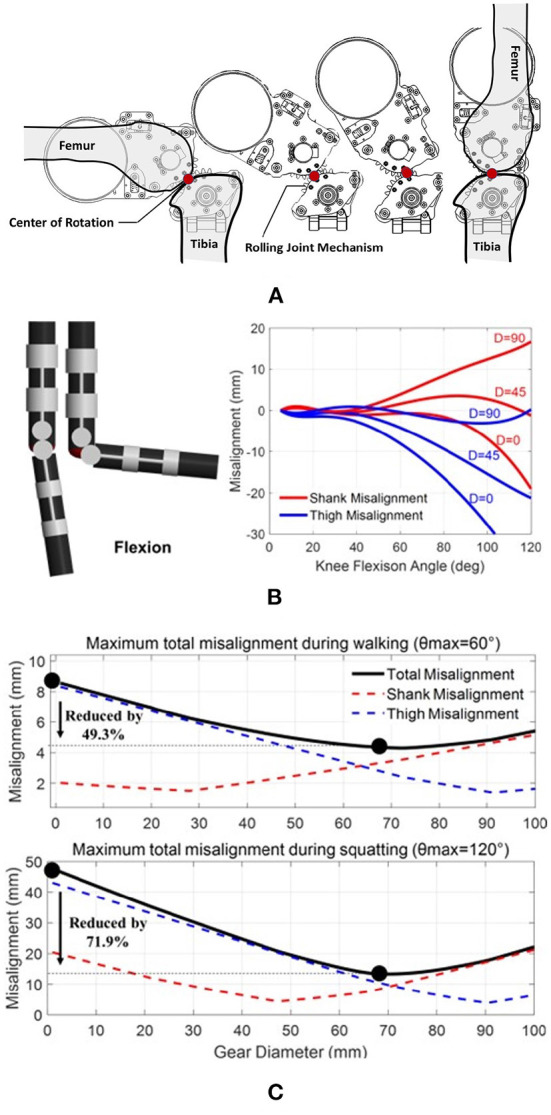
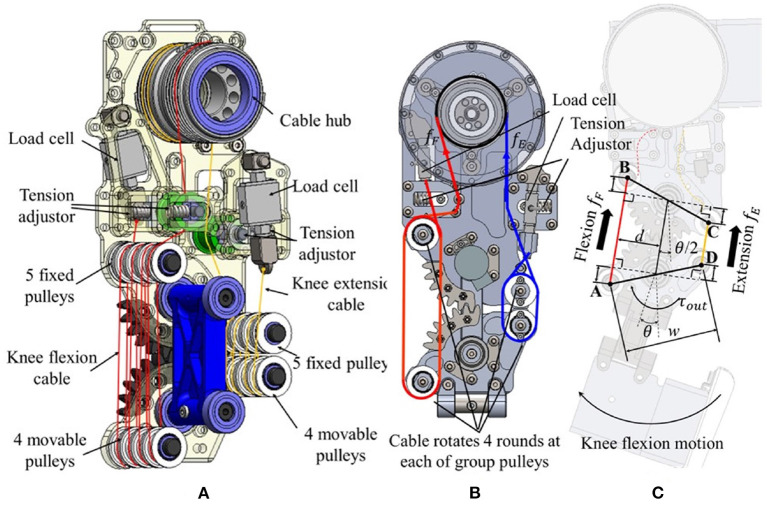
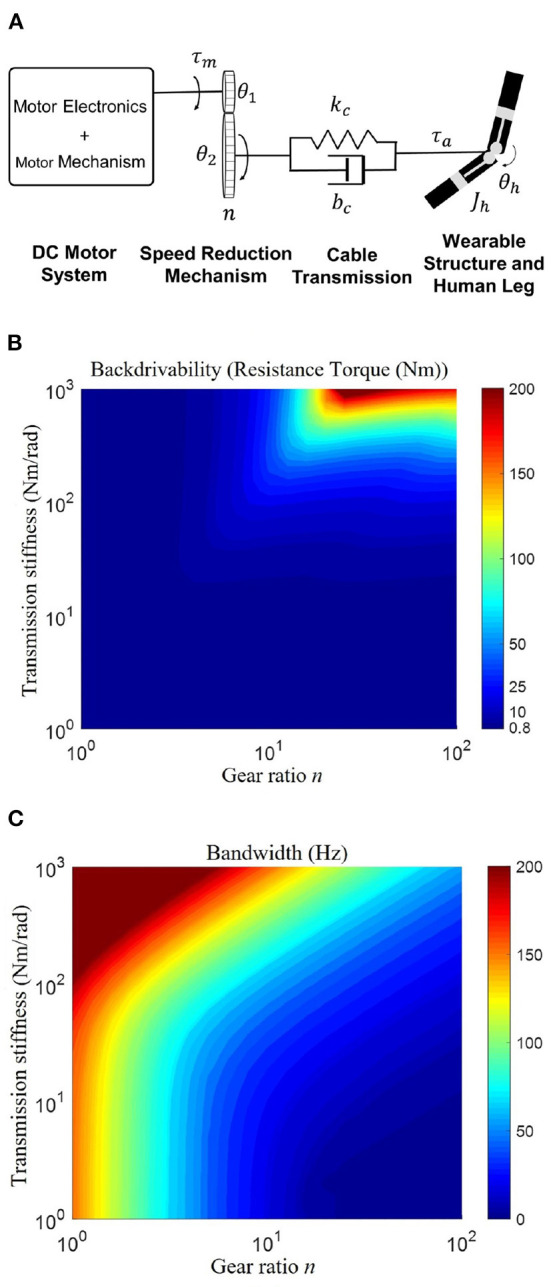
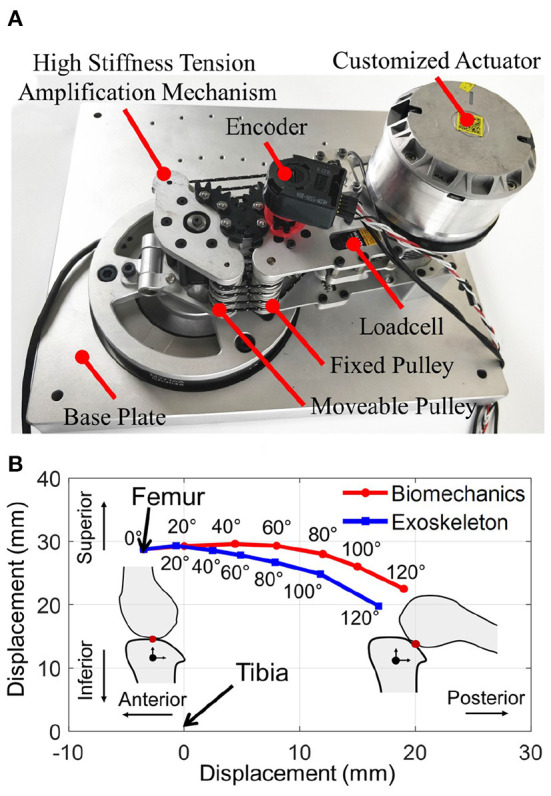
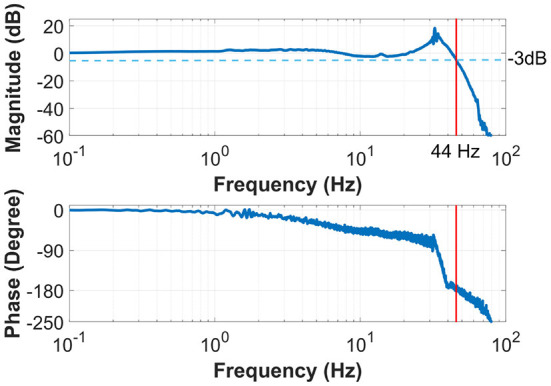
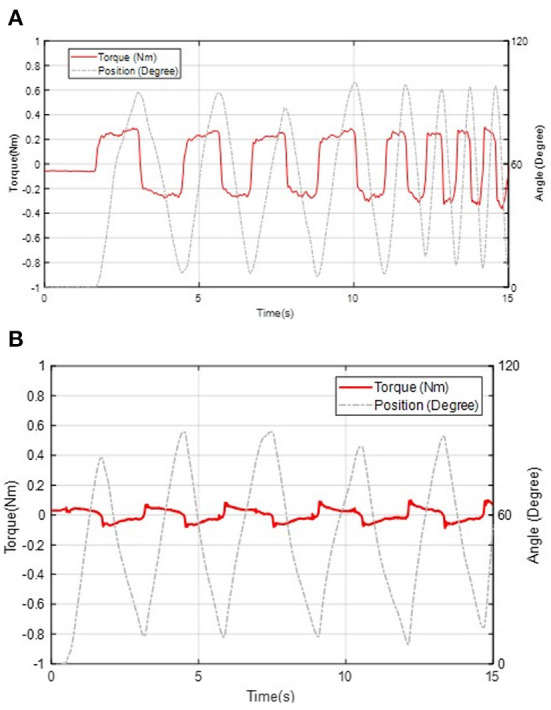
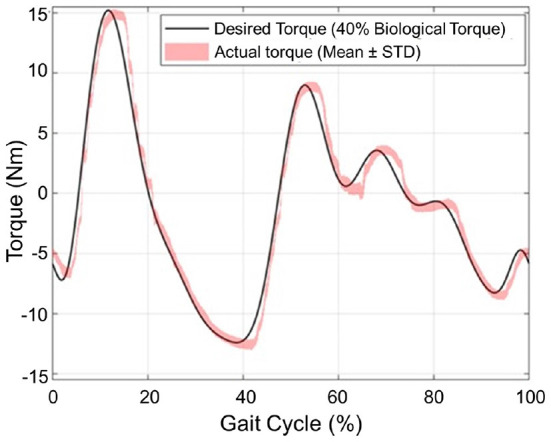
Powered knee exoskeletons have shown potential for mobility restoration and power augmentation. However, the benefits of exoskeletons are partially offset by some design challenges that still limit their positive effects on people. Among them, joint misalignment is a critical aspect mostly because the human knee joint movement is not a fixed-axis rotation. In addition, remarkable mass and stiffness are also limitations. Aiming to minimize joint misalignment, this paper proposes a bio-inspired knee exoskeleton with a joint design that mimics the human knee joint. Moreover, to accomplish a lightweight and high compliance design, a high stiffness cable-tension amplification mechanism is leveraged. Simulation results indicate our design can reduce 49.3 and 71.9% maximum total misalignment for walking and deep squatting activities, respectively. Experiments indicate that the exoskeleton has high compliance (0.4 and 0.1 Nm backdrive torque under unpowered and zero-torque modes, respectively), high control bandwidth (44 Hz), and high control accuracy (1.1 Nm root mean square tracking error, corresponding to 7.3% of the peak torque). This work demonstrates performance improvement compared with state-of-the-art exoskeletons.
Keywords: bioinspired design; cable-driven; complaint actuators; knee exoskeleton; self-alignment.
Copyright © 2022 Yu, Huang, Di Lallo, Zhang, Wang, Fu and Su.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures
References
-
- Carrozza M. C., Micera S., Pons J. L. (2018). Wearable robotics: challenges and trends, in Proceedings of the 4th International Symposium on Wearable Robotics, WEROB2018 (Pisa: ). 10.1007/978-3-030-01887-0 - DOI
-
- Celebi B., Yalcin M., Patoglu V. (2013). Assiston-knee: a self-aligning knee exoskeleton, in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (Tokyo: IEEE; ), 996–1002. 10.1109/IROS.2013.6696472 - DOI
LinkOut - more resources
Full Text Sources