

TSD-Truncated Structurally Aware Distance for Small Pest Object Detection
- PMID: 36433294
- PMCID: PMC9692880
- DOI: 10.3390/s22228691
TSD-Truncated Structurally Aware Distance for Small Pest Object Detection
Abstract
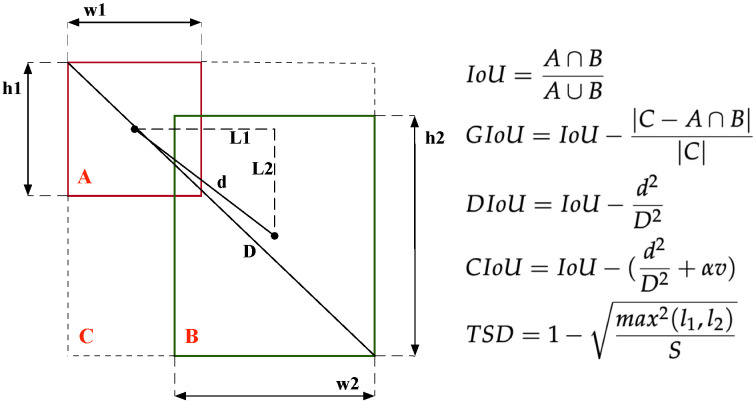
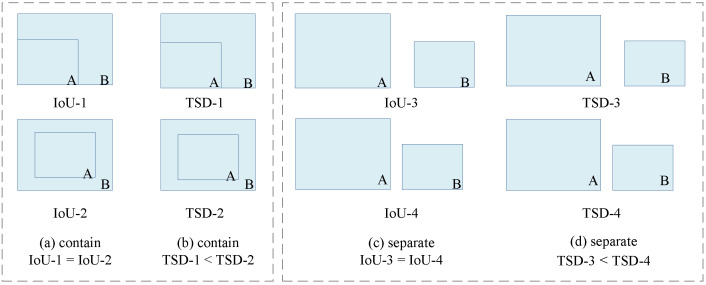
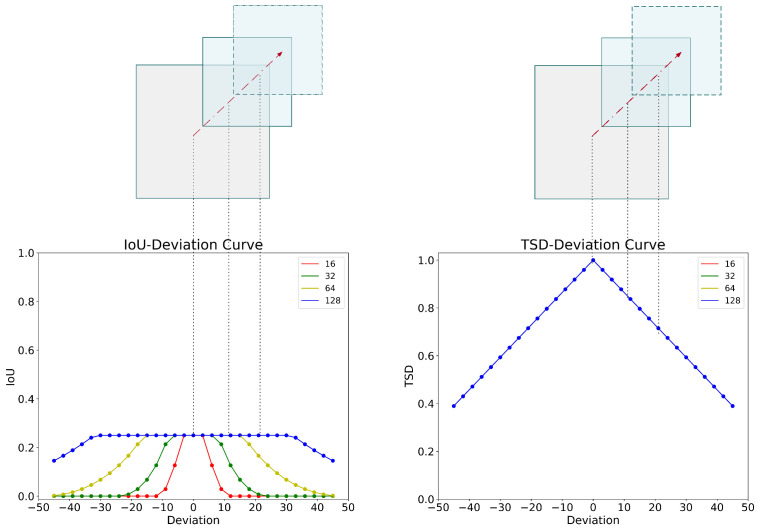
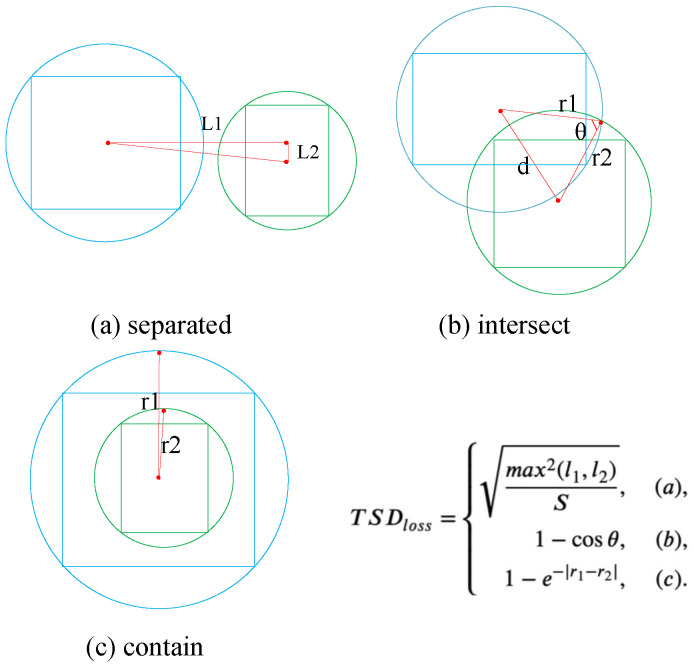
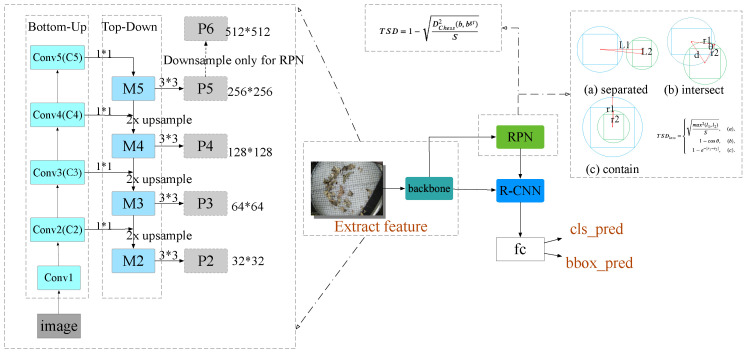
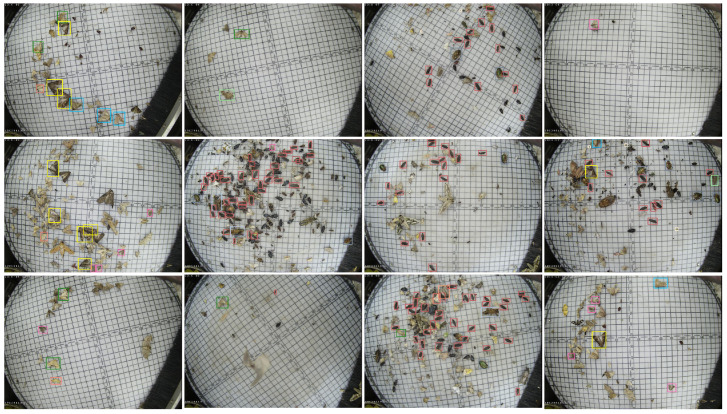
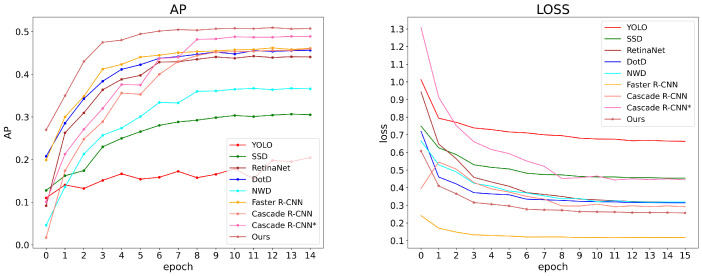
As deep learning has been successfully applied in various domains, it has recently received considerable research attention for decades, making it possible to efficiently and intelligently detect crop pests. Nevertheless, the detection of pest objects is still challenging due to the lack of discriminative features and pests' aggregation behavior. Recently, intersection over union (IoU)-based object detection has attracted much attention and become the most widely used metric. However, it is sensitive to small-object localization bias; furthermore, IoU-based loss only works when ground truths and predicted bounding boxes are intersected, and it lacks an awareness of different geometrical structures. Therefore, we propose a simple and effective metric and a loss function based on this new metric, truncated structurally aware distance (TSD). Firstly, the distance between two bounding boxes is defined as the standardized Chebyshev distance. We also propose a new regression loss function, truncated structurally aware distance loss, which consider the different geometrical structure relationships between two bounding boxes and whose truncated function is designed to impose different penalties. To further test the effectiveness of our method, we apply it on the Pest24 small-object pest dataset, and the results show that the mAP is 5.0% higher than other detection methods.
Keywords: faster R-CNN; pest detection; small object detection; truncated structurally aware distance; truncated structurally aware loss.
Conflict of interest statement
There is no conflict of interest.
Figures


Similar articles
-
Corner-Point and Foreground-Area IoU Loss: Better Localization of Small Objects in Bounding Box Regression.Sensors (Basel). 2023 May 22;23(10):4961. doi: 10.3390/s23104961. Sensors (Basel). 2023. PMID: 37430876 Free PMC article.
-
Elevating Detection Performance in Optical Remote Sensing Image Object Detection: A Dual Strategy with Spatially Adaptive Angle-Aware Networks and Edge-Aware Skewed Bounding Box Loss Function.Sensors (Basel). 2024 Aug 18;24(16):5342. doi: 10.3390/s24165342. Sensors (Basel). 2024. PMID: 39205035 Free PMC article.
-
Probabilistic Intersection-Over-Union for Training and Evaluation of Oriented Object Detectors.IEEE Trans Image Process. 2024;33:671-681. doi: 10.1109/TIP.2023.3348697. Epub 2024 Jan 12. IEEE Trans Image Process. 2024. PMID: 38190671
-
An Enhanced Insect Pest Counter Based on Saliency Map and Improved Non-Maximum Suppression.Insects. 2021 Aug 6;12(8):705. doi: 10.3390/insects12080705. Insects. 2021. PMID: 34442271 Free PMC article.
-
The region of interest localization for glaucoma analysis from retinal fundus image using deep learning.Comput Methods Programs Biomed. 2018 Oct;165:25-35. doi: 10.1016/j.cmpb.2018.08.003. Epub 2018 Aug 8. Comput Methods Programs Biomed. 2018. PMID: 30337079
Cited by
-
Yolo-Pest: An Insect Pest Object Detection Algorithm via CAC3 Module.Sensors (Basel). 2023 Mar 17;23(6):3221. doi: 10.3390/s23063221. Sensors (Basel). 2023. PMID: 36991930 Free PMC article.
References
-
- Ku J., Mozifian M., Lee J., Harakeh A., Waslander S.L. Joint 3d proposal generation and object detection from view aggregation; Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); Madrid, Spain. 1–5 October 2018; pp. 1–8.
-
- Zhou Y., Wen S., Wang D., Mu J., Richard I. Object Detection in Autonomous Driving Scenarios Based on an Improved Faster-RCNN. Appl. Sci. 2021;11:11630. doi: 10.3390/app112411630. - DOI
-
- He Y., Liu Z. A feature fusion method to improve the driving obstacle detection under foggy weather. IEEE Trans. Transp. Electrif. 2021;7:2505–2515. doi: 10.1109/TTE.2021.3080690. - DOI
-
- Zeng N., Wu P., Wang Z., Li H., Liu W., Liu X. A small-sized object detection oriented multi-scale feature fusion approach with application to defect detection. IEEE Trans. Instrum. Meas. 2022;71:1–14. doi: 10.1109/TIM.2022.3153997. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
