

Roles of Mono- and Bi-articular Muscles in Human Limbs: Two-joint Link Model and Applications
- PMID: 36441608
- PMCID: PMC9681132
- DOI: 10.1093/iob/obac042
Roles of Mono- and Bi-articular Muscles in Human Limbs: Two-joint Link Model and Applications
Abstract
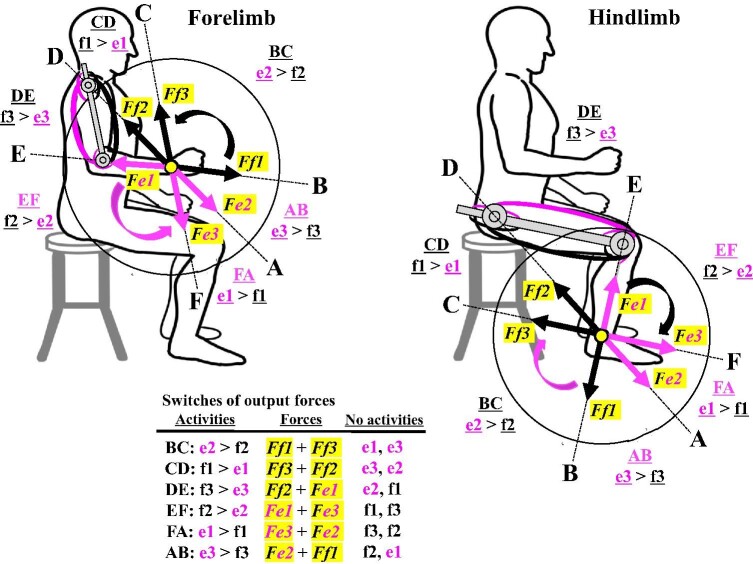
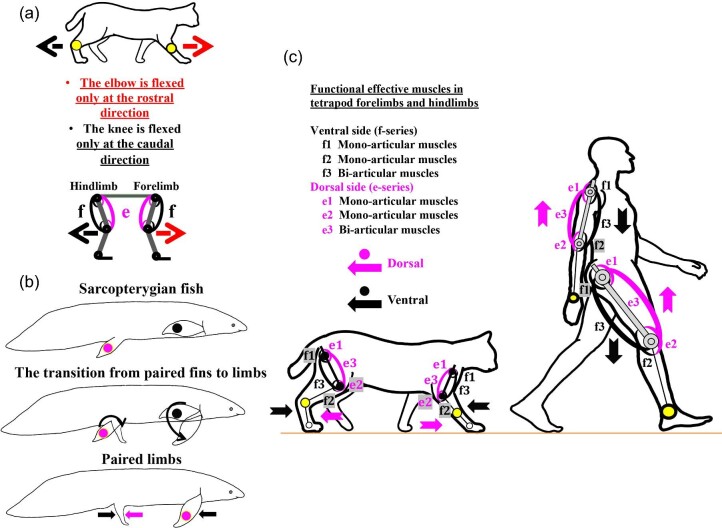
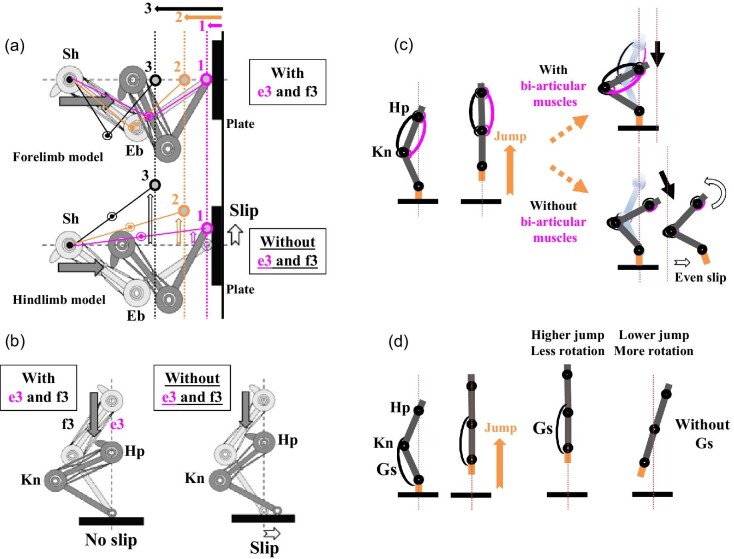
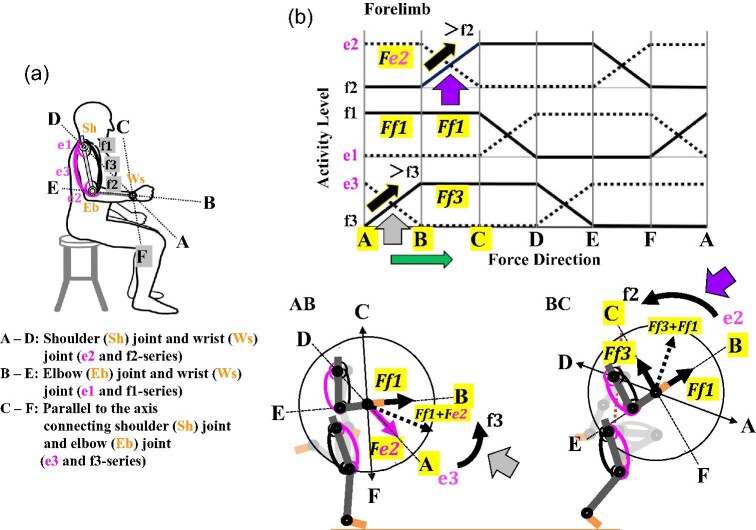
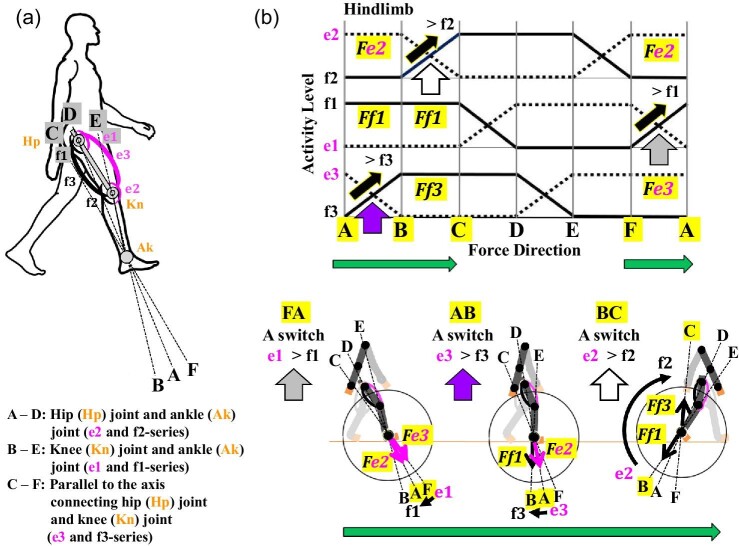
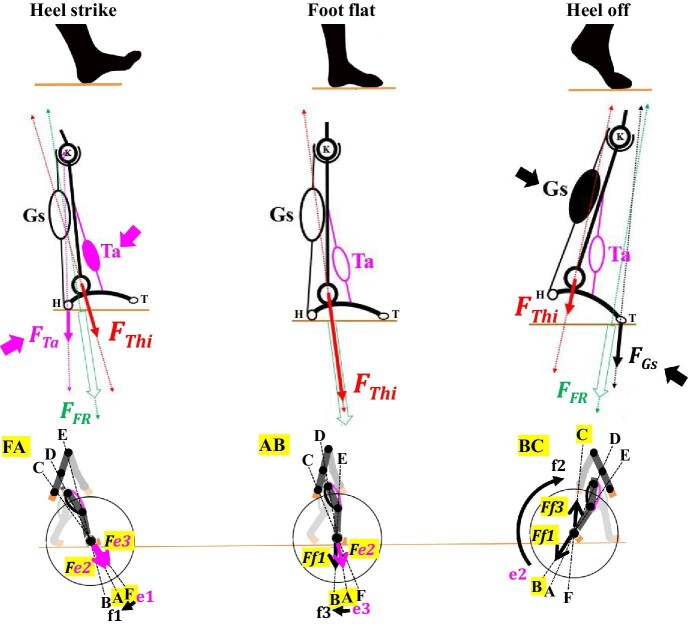
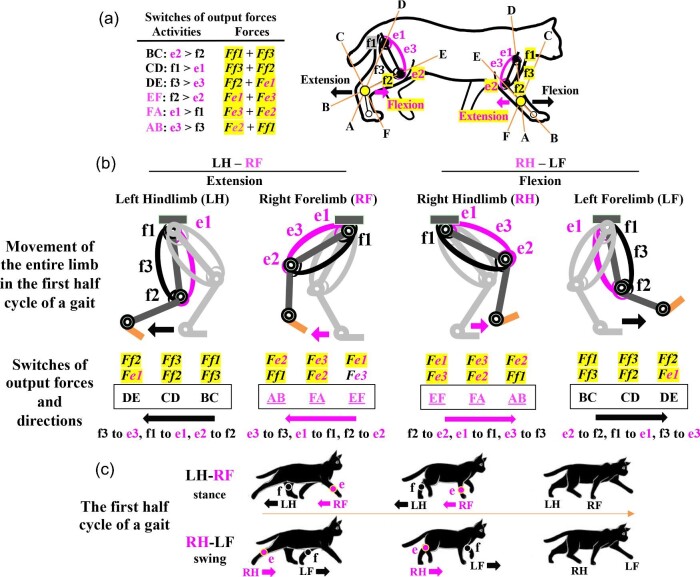
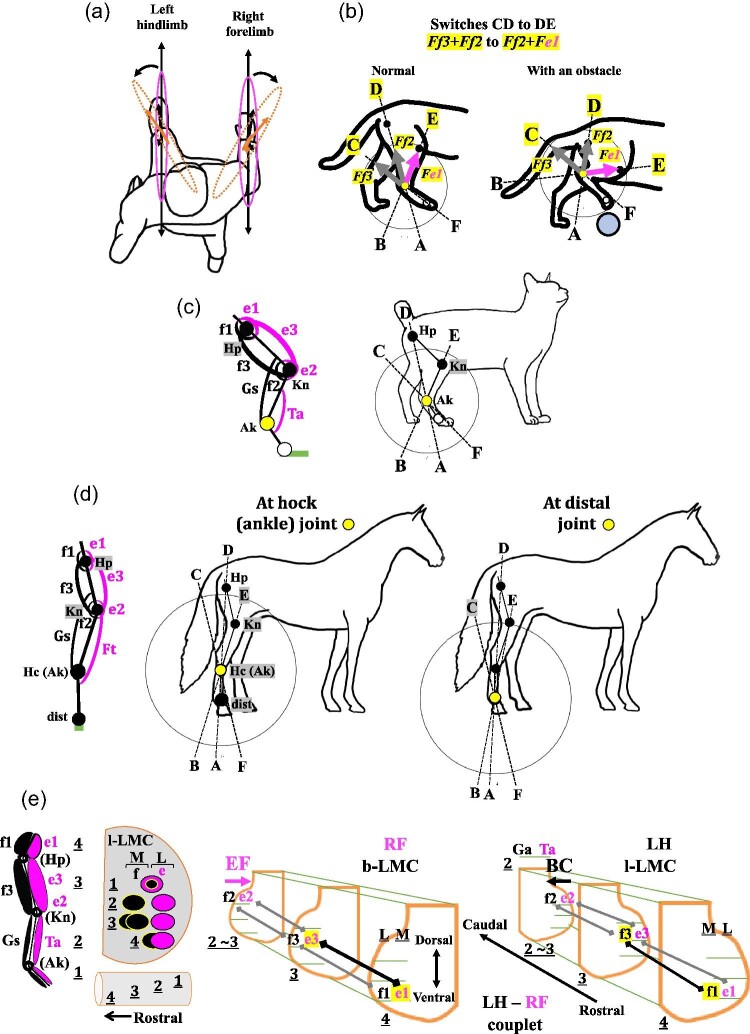
We review the two-joint link model of mono- and bi-articular muscles in the human branchium and thigh for applications related to biomechanical studies of tetrapod locomotion including gait analyses of humans and non-human tetrapods. This model has been proposed to elucidate functional roles of human mono- and bi-articular muscles by analyzing human limb movements biomechanically and testing the results both theoretically and mechanically using robotic arms and legs. However, the model has not yet been applied to biomechanical studies of tetrapod locomotion, in part since it was established based mainly on mechanical engineering analyses and because it has been applied mostly to robotics, fields of mechanical engineering, and to rehabilitation sciences. When we discovered and published the identical pairs of mono- and bi-articular muscles in pectoral fins of the coelacanth fish Latimeria chalumnae to those of humans, we recognized the significant roles of mono- and bi-articular muscles in evolution of tetrapod limbs from paired fins and tetrapod limb locomotion. Therefore, we have been reviewing the theoretical background and mechanical parameters of the model in order to analyze functional roles of mono- and bi-articular muscles in tetrapod limb locomotion. Herein, we present re-defined biological parameters including 3 axes among 3 joints of forelimbs or hindlimbs that the model has formulated and provide biological and analytical tools and examples to facilitate applicable power of the model to our on-going gait analyses of humans and tetrapods.
本総説は、ヒトやヒト以外の四肢動物における歩容解析を含む四肢運動を生体工学研究へ応用することを目的として、ヒトの上腕や大腿の一関節筋・二関節筋リンクモデルを概説したものである。このモデルは元来、ヒトの四肢運動から得られた生体力学的解析結果を、ロボットアームやロボットレッグを用いて理論的・力学的に検証するというアプローチで提唱された概念である。機械工学的な解析に基づいて確立された研究背景から、このモデルは主に、ロボット工学や機械工学、リハビリテーション科学の分野への応用が進んだが、四肢動物の四肢運動に関する生体力学への応用は進まなかった。同じ頃、我々は、シーラカンスLatimeria chalumnaeの胸鰭にヒト上腕と相当の対をなす一関節筋・二関節筋が存在することを発見し、鰭から四肢への進化や四肢運動において、これらの筋が重要な役割を果たす可能性を見出していた。この発見を起点として、我々は、四肢動物の四肢運動における一関節筋・二関節筋の機能的役割を明らかにするために、このモデルの理論的背景や機械的パラメーターを再検証した。その結果、このモデルが定式化した前肢や後肢の三関節間にまたがる三つの軸を含むパラメーターを補正し、生物学的パラーメーターとして再定義することで、四肢動物の四肢運動の解析が可能となるという結論に至った。本総説では、我々が現在進行中の歩容解析を例に、ヒトやヒト以外の四肢動物における四肢運動の生体工学研究へこのモデルを応用するための生物学的解析手法を含めて概説する。.
© The Author(s) 2022. Published by Oxford University Press on behalf of the Society for Integrative and Comparative Biology.
Figures
Similar articles
-
The pectoral fin muscles of the coelacanth Latimeria chalumnae: Functional and evolutionary implications for the fin-to-limb transition and subsequent evolution of tetrapods.Anat Rec (Hoboken). 2016 Sep;299(9):1203-23. doi: 10.1002/ar.23392. Epub 2016 Jul 22. Anat Rec (Hoboken). 2016. PMID: 27343022
-
Control engineering and electromyographic kinesiology analyses of normal human gait.J Orthop Sci. 2000;5(2):139-49. doi: 10.1007/s007760050141. J Orthop Sci. 2000. PMID: 10982648
-
Evolution of Hindlimb Muscle Anatomy Across the Tetrapod Water-to-Land Transition, Including Comparisons With Forelimb Anatomy.Anat Rec (Hoboken). 2020 Feb;303(2):218-234. doi: 10.1002/ar.23997. Epub 2018 Nov 25. Anat Rec (Hoboken). 2020. PMID: 30365249
-
[Evolution of tetrapod locomotion].Zh Obshch Biol. 2002 Sep-Oct;63(5):426-45. Zh Obshch Biol. 2002. PMID: 12395754 Review. Russian.
-
Reconstructing pectoral appendicular muscle anatomy in fossil fish and tetrapods over the fins-to-limbs transition.Biol Rev Camb Philos Soc. 2018 May;93(2):1077-1107. doi: 10.1111/brv.12386. Epub 2017 Nov 10. Biol Rev Camb Philos Soc. 2018. PMID: 29125205 Review.
Cited by
-
Comparison of subject-specific musculoskeletal model calibration strategies on muscle force and fatigue estimation.J Neuroeng Rehabil. 2025 Jul 10;22(1):156. doi: 10.1186/s12984-025-01691-z. J Neuroeng Rehabil. 2025. PMID: 40640829 Free PMC article.
-
Inter-lower limb and intra-lower limb muscle activity correlations during walking: A comparative study of stroke patients and healthy individuals.PLoS One. 2025 May 12;20(5):e0319955. doi: 10.1371/journal.pone.0319955. eCollection 2025. PLoS One. 2025. PMID: 40354342 Free PMC article.
References
-
- Abe T, Koide T, Furukawa K, Ochi A, Oshima T, Fujikawa T.. 2014. Parallel linkage function of the rectus femoris when standing up. Jour Robotics Soc Japan 32:190–207. In Japanese.
-
- Abu-Farj ZO, Harris GF, Smith PA, Hassani S.. 2015. Human gait and clinical movement analysis. In: Encyclopedia of Electronics Engineering. 2nd Edition. New York: John Wiley & Sons, Inc. p. 1–34.
-
- Agbarajl EC, Inylama HC, Okezle CC.. 2017. Dynamic modeling of a 3-DOF articulated robotic manipulator based on independent joint scheme. Phy Sci Inter J 15:1–10.
-
- Aizawa K, Ishii S, Kumamoto M.. 2008. Motion analysis by a functional effective muscle display (FEMS). In: Kumamoto M, editor. Bi-articular muscles: Motion control and rehabilitation. Tokyo: IGAKU-SHOIN, Ltd. p. 98–114. In Japanese. ISBN:978-4-260-00592-0.
Publication types
LinkOut - more resources
Full Text Sources