

Rolling microswarms along acoustic virtual walls
- PMID: 36446799
- PMCID: PMC9708833
- DOI: 10.1038/s41467-022-35078-8
Rolling microswarms along acoustic virtual walls
Abstract
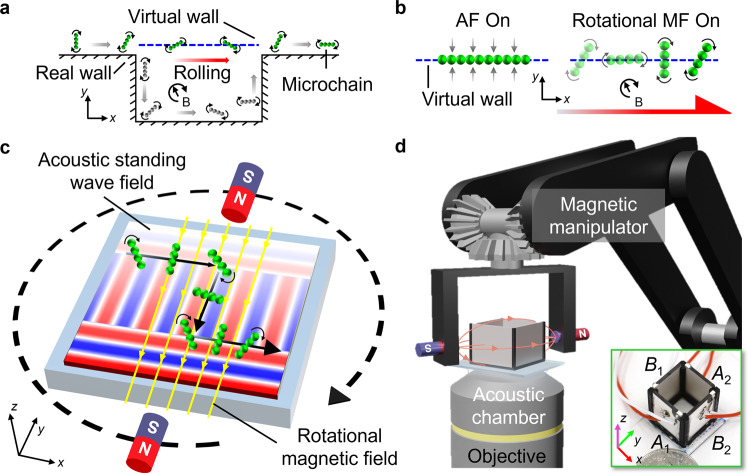
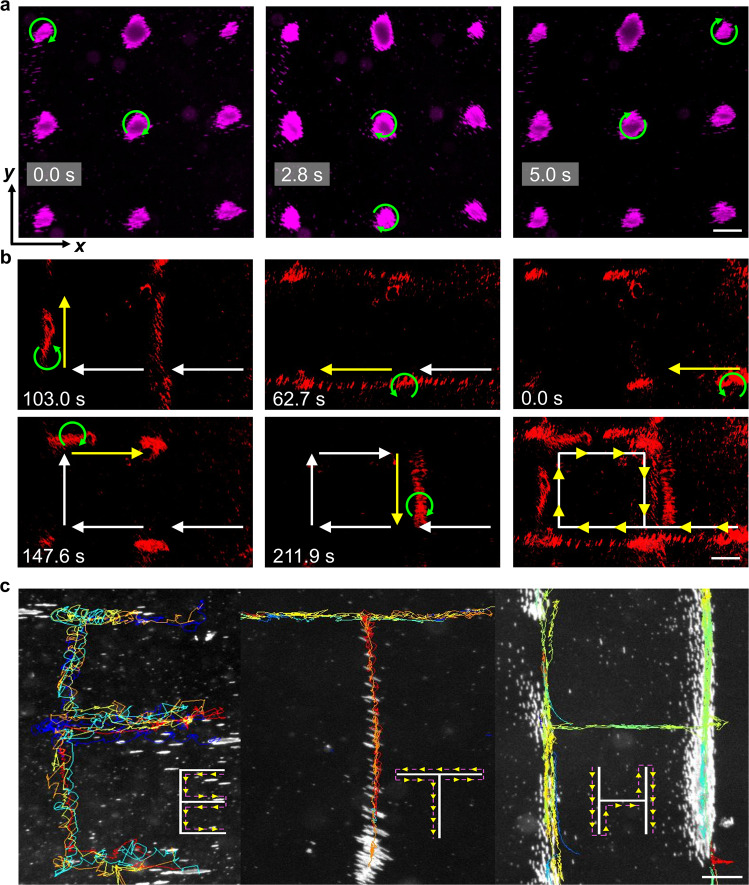
Rolling is a ubiquitous transport mode utilized by living organisms and engineered systems. However, rolling at the microscale has been constrained by the requirement of a physical boundary to break the spatial homogeneity of surrounding mediums, which limits its prospects for navigation to locations with no boundaries. Here, in the absence of real boundaries, we show that microswarms can execute rolling along virtual walls in liquids, impelled by a combination of magnetic and acoustic fields. A rotational magnetic field causes individual particles to self-assemble and rotate, while the pressure nodes of an acoustic standing wave field serve as virtual walls. The acoustic radiation force pushes the microswarms towards a virtual wall and provides the reaction force needed to break their fore-aft motion symmetry and induce rolling along arbitrary trajectories. The concept of reconfigurable virtual walls overcomes the fundamental limitation of a physical boundary being required for universal rolling movements.
© 2022. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- Bar-Cohen Y. Biomimetics: Nature Based Innovation. CRC Press; 2012.
-
- García-París M, Deban SM. A novel antipredator mechanism in salamanders: rolling escape in hydromantes platycephalus. J. Herpetol. 1995;29:149–151. doi: 10.2307/1565105. - DOI
-
- Armour RH, Vincent JF. Rolling in nature and robotics: a review. J. Bionic Eng. 2006;3:195–208. doi: 10.1016/S1672-6529(07)60003-1. - DOI
Publication types
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
