

Autonomous control for miniaturized mobile robots in unknown pipe networks
- PMID: 36466736
- PMCID: PMC9709324
- DOI: 10.3389/frobt.2022.997415
Autonomous control for miniaturized mobile robots in unknown pipe networks
Abstract
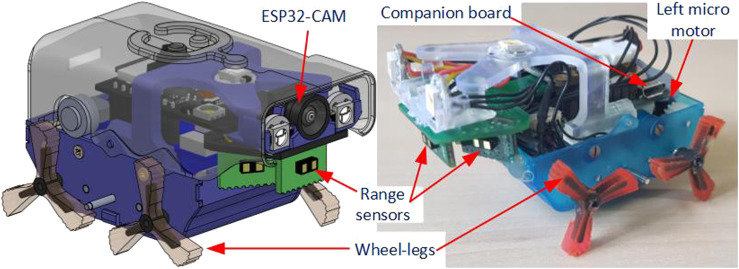
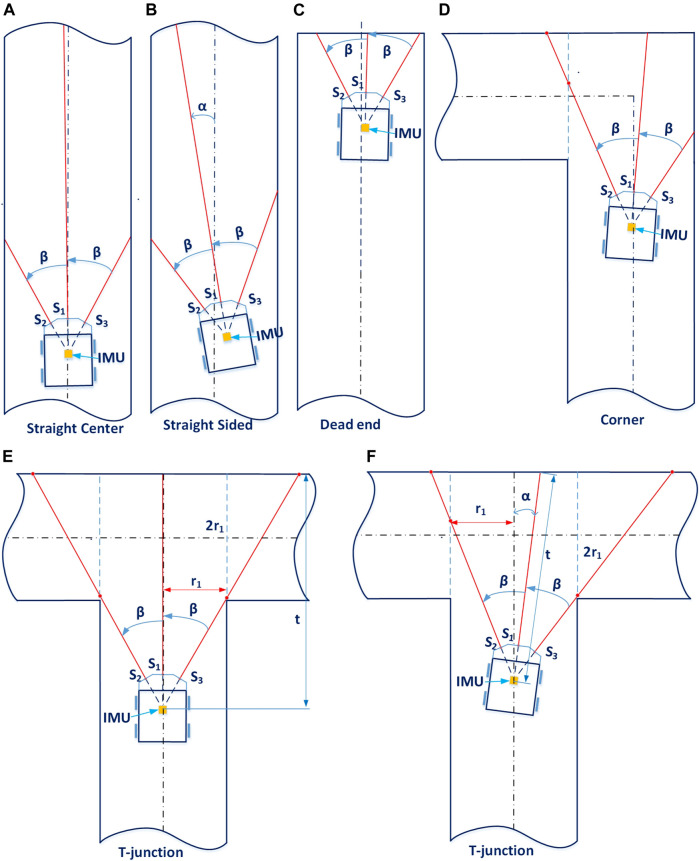
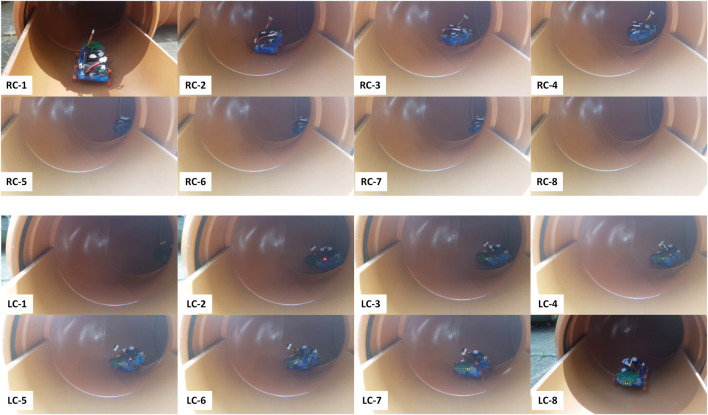
Despite recent advances in robotic technology, sewer pipe inspection is still limited to conventional approaches that use cable-tethered robots. Such commercially available tethered robots lack autonomy, and their operation must be manually controlled via their tethered cables. Consequently, they can only travel to a certain distance in pipe, cannot access small-diameter pipes, and their deployment incurs high costs for highly skilled operators. In this paper, we introduce a miniaturised mobile robot for pipe inspection. We present an autonomous control strategy for this robot that is effective, stable, and requires only low-computational resources. The robots used here can access pipes as small as 75 mm in diameter. Due to their small size, low carrying capacity, and limited battery supply, our robots can only carry simple sensors, a small processor, and miniature wheel-legs for locomotion. Yet, our control method is able to compensate for these limitations. We demonstrate fully autonomous robot mobility in a sewer pipe network, without any visual aid or power-hungry image processing. The control algorithm allows the robot to correctly recognise each local network configuration, and to make appropriate decisions accordingly. The control strategy was tested using the physical micro robot in a laboratory pipe network. In both simulation and experiment, the robot autonomously and exhaustively explored an unknown pipe network without missing any pipe section while avoiding obstacles. This is a significant advance towards fully autonomous inspection robot systems for sewer pipe networks.
Keywords: autonomous control; exhaustive search; exploration; in-pipe robot; infrastructure robot; miniature robot; navigation; water & sewer pipes.
Copyright © 2022 Nguyen, Blight, Pickering, Jackson-Mills, Barber, Boyle, Richardson, Dogar and Cohen.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures







References
-
- Aitken J. M., Evans M. H., Worley R., Edwards S., Zhang R., Dodd T., et al. (2021). Simultaneous localization and mapping for inspection robots in water and sewer pipe networks: A review. IEEE Access 9, 140173–140198. 10.1109/access.2021.3115981 - DOI
-
- Brown L., Carrasco J., Watson S. (2021). Autonomous elbow controller for differential drive in-pipe robots. Robotics 10 (1), 28. 10.3390/robotics10010028 - DOI
-
- Chuang T. Y., Sung C. C. (2020). Learning and SLAM based decision support platform for sewer inspection. Remote Sens. 12 (6), 968. 10.3390/rs12060968 - DOI
-
- Debenest P., Guarnieri M., Hirose S. (2014). “PipeTron series - robots for pipe inspection,” in Proceedings of the 2014 3rd International Conference on Applied Robotics for the Power Industry (Foz do Iguacu, Brazil: IEEE; ). 10.1109/CARPI.2014.7030052 - DOI
-
- Drainagesuperstore (2022). Underground drain pipe sizes [Internet]. Available at: https://www.drainagesuperstore.co.uk/help-and-advice/product-guides/unde... (Accessed July 4, 2022).
LinkOut - more resources
Full Text Sources
Miscellaneous