

Object Detection Based on Roadside LiDAR for Cooperative Driving Automation: A Review
- PMID: 36502018
- PMCID: PMC9738246
- DOI: 10.3390/s22239316
Object Detection Based on Roadside LiDAR for Cooperative Driving Automation: A Review
Abstract
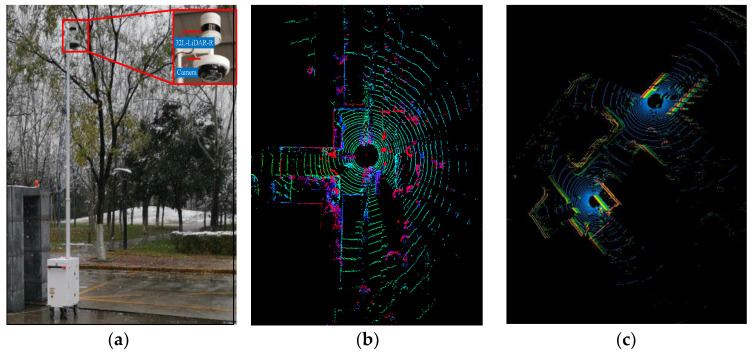
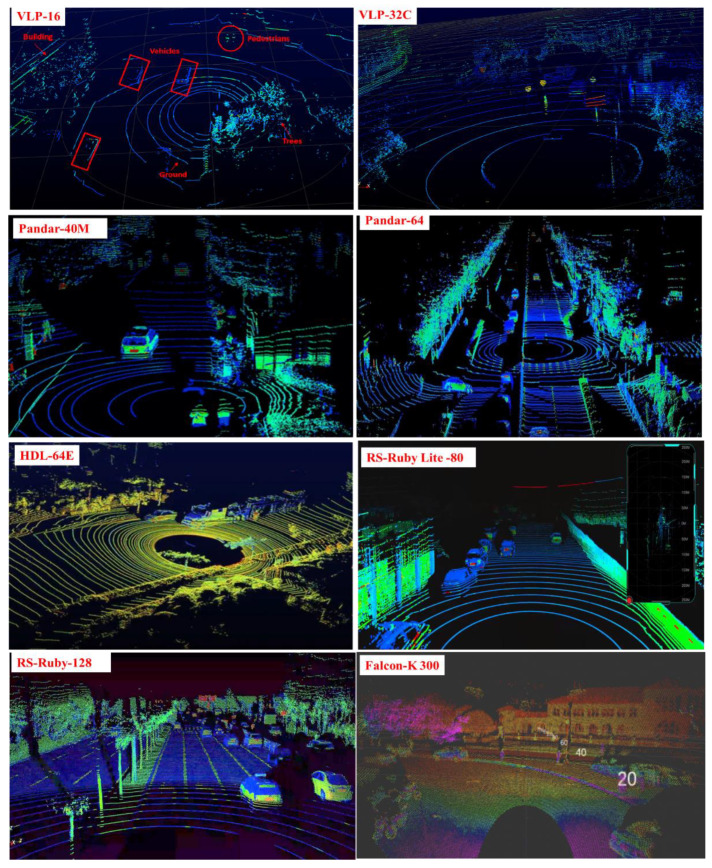
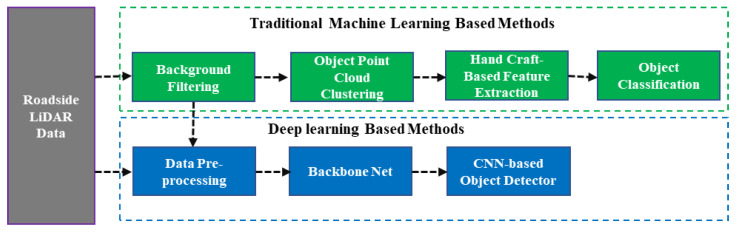
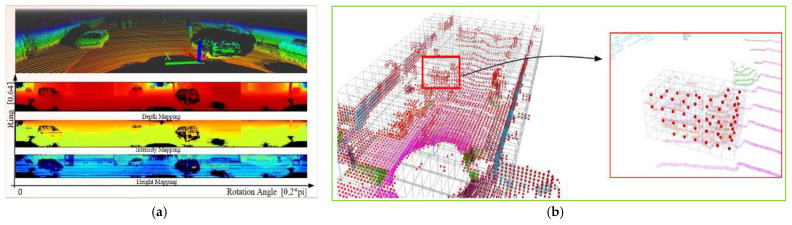
Light Detection and Ranging (LiDAR) technology has the advantages of high detection accuracy, a wide range of perception, and not being affected by light. The 3D LiDAR is placed at the commanding height of the traffic scene, the overall situation can be grasped from the perspective of top view, and the trajectory of each object in the traffic scene can be accurately perceived in real time, and then the object information can be distributed to the surrounding vehicles or other roadside LiDAR through advanced wireless communication equipment, which can significantly improve the local perception ability of an autonomous vehicle. This paper first describes the characteristics of roadside LiDAR and the challenges of object detection and then reviews in detail the current methods of object detection based on a single roadside LiDAR and multi-LiDAR cooperatives. Then, some studies for roadside LiDAR perception in adverse weather and datasets released in recent years are introduced. Finally, some current open challenges and future works for roadside LiDAR perception are discussed. To the best of our knowledge, this is the first work to systematically study roadside LiDAR perception methods and datasets. It has an important guiding role in further promoting the research of roadside LiDAR perception for practical applications.
Keywords: a review; cooperative perception; object detection; roadside LiDAR.
Conflict of interest statement
The authors declare no conflict of interest.
Figures


Similar articles
-
Vehicle Detection under Adverse Weather from Roadside LiDAR Data.Sensors (Basel). 2020 Jun 17;20(12):3433. doi: 10.3390/s20123433. Sensors (Basel). 2020. PMID: 32560568 Free PMC article.
-
3D Object Detection with SLS-Fusion Network in Foggy Weather Conditions.Sensors (Basel). 2021 Oct 9;21(20):6711. doi: 10.3390/s21206711. Sensors (Basel). 2021. PMID: 34695925 Free PMC article.
-
Real-Time 3D Object Detection and SLAM Fusion in a Low-Cost LiDAR Test Vehicle Setup.Sensors (Basel). 2021 Dec 15;21(24):8381. doi: 10.3390/s21248381. Sensors (Basel). 2021. PMID: 34960468 Free PMC article.
-
A Survey on Deep-Learning-Based LiDAR 3D Object Detection for Autonomous Driving.Sensors (Basel). 2022 Dec 7;22(24):9577. doi: 10.3390/s22249577. Sensors (Basel). 2022. PMID: 36559950 Free PMC article. Review.
-
An Overview of Autonomous Vehicles Sensors and Their Vulnerability to Weather Conditions.Sensors (Basel). 2021 Aug 10;21(16):5397. doi: 10.3390/s21165397. Sensors (Basel). 2021. PMID: 34450839 Free PMC article. Review.
Cited by
-
Research on an Adaptive Method for the Angle Calibration of Roadside LiDAR Point Clouds.Sensors (Basel). 2023 Aug 30;23(17):7542. doi: 10.3390/s23177542. Sensors (Basel). 2023. PMID: 37687998 Free PMC article.
-
Enhanced Perception for Autonomous Vehicles at Obstructed Intersections: An Implementation of Vehicle to Infrastructure (V2I) Collaboration.Sensors (Basel). 2024 Jan 31;24(3):936. doi: 10.3390/s24030936. Sensors (Basel). 2024. PMID: 38339653 Free PMC article.
-
DRGAN: Dense Residual Generative Adversarial Network for Image Enhancement in an Underwater Autonomous Driving Device.Sensors (Basel). 2023 Oct 7;23(19):8297. doi: 10.3390/s23198297. Sensors (Basel). 2023. PMID: 37837125 Free PMC article.
-
Improved YOLOv5 Network for High-Precision Three-Dimensional Positioning and Attitude Measurement of Container Spreaders in Automated Quayside Cranes.Sensors (Basel). 2024 Aug 23;24(17):5476. doi: 10.3390/s24175476. Sensors (Basel). 2024. PMID: 39275386 Free PMC article.
-
Deep Neural Network-Based Phase-Modulated Continuous-Wave LiDAR.Sensors (Basel). 2024 Mar 1;24(5):1617. doi: 10.3390/s24051617. Sensors (Basel). 2024. PMID: 38475153 Free PMC article.
References
-
- China SAR . Energy-Saving and New Energy Vehicle Technology Roadmap 2.0. China SAR; Beijing, China: 2020.
-
- Rana M., Hossain K. Connected and autonomous vehicles and infrastructures: A literature review. Int. J. Pavement Res. Technol. 2021 doi: 10.1007/s42947-021-00130-1. - DOI
-
- Van Brummelen J., O’Brien M., Gruyer D., Najjaran H. Autonomous vehicle perception: The technology of today and tomorrow. Transp. Res. Part C Emerg. Technol. 2018;89:384–406. doi: 10.1016/j.trc.2018.02.012. - DOI
-
- Liu S., Yu B., Tang J., Zhu Q. Towards fully intelligent transportation through infrastructure-vehicle cooperative autonomous driving: Challenges and opportunities; Proceedings of the 2021 58th ACM/IEEE Design Automation Conference (DAC); San Francisco, CA, USA. 5–9 December 2021; pp. 1323–1326.
-
- Sun Q., Chen X., Liang F., Tang X., He S., Lu H. Target Recognition of Millimeter-wave Radar based on YOLOX. J. Phys. Conf. Ser. 2022;2289:012012. doi: 10.1088/1742-6596/2289/1/012012. - DOI
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
